Ein Roboterprogramm erstellen
Es ist möglich, jedes Programm einzeln oder das Hauptprogramm einschließlich der Unterprogramme zu exportieren:
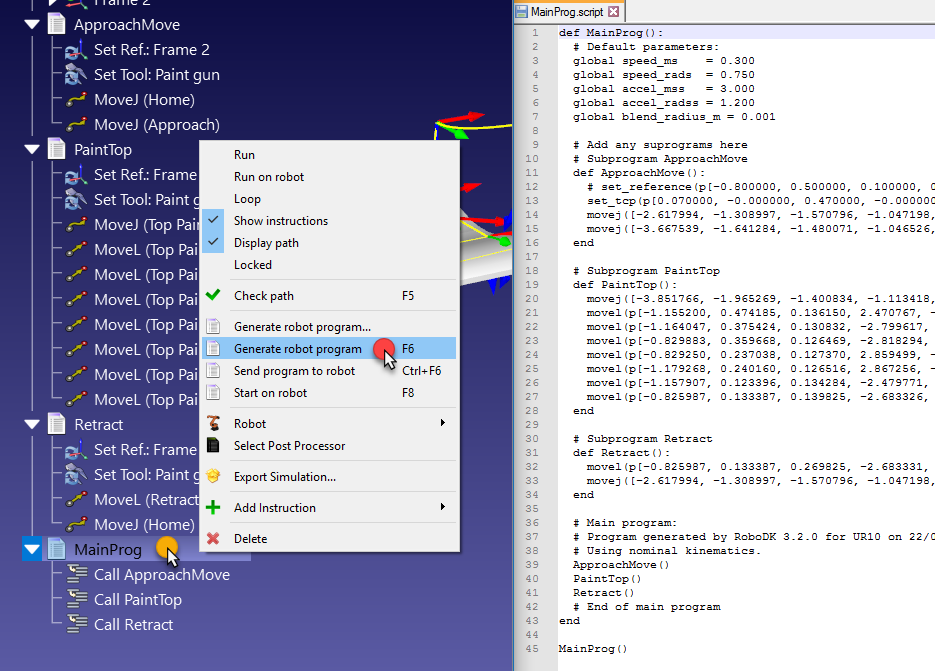
1.Rechtsklick auf Programm (MainProg beispielsweise)
2.Wählen Sie Roboter Programm erstellen (F6)
Alternativ, können Sie Roboter Programm erstellen… wählen um den Speicherort zu bestimmen. SCRIPT Programm für UR Roboter, wird in einem Texteditor angezeigt.
Diese Datei ist das Ergebnis des offline erstellten Programms. Die Datei kann an die Robotersteuerung gesendet werden, um dieselben Bewegungen auszuführen, die in RoboDK simuliert wurden.
●Wählen Sie Programm an Roboter senden (Strg+F6) um ein Programm via FTP zu senden (Offline Programming)
●Wählen Sie Auf Roboter starten (F8): um ein Programm an den Roboter zu senden und auszuführen (Offline Programming)
●Wählen Sie die Option Auf Roboter ausführen um das Programm Schritt für Schritt auszuführen, sobald das Programm abgespielt wird (Online-Programmierung). Dies ermöglicht es, das Programm auf dem Roboter auszuführen, während es gleichzeitig simuliert wird. Robotertreiber sind für die Online-Programmierung erforderlich.
Es ist möglich, den Postprozessor für UR-Roboter zu ändern und die Art und Weise anzupassen, wie ein Programm generiert wird:
1.Rechtsklick auf ein Programm oder einen Roboter
2.Wählen Sie 
3.Wählen Sie Universal Robots
Generieren Sie das Programm erneut. In diesem Beispiel verwendet der Standardpostprozessor achsspezifische Angaben/Gelenkwinkel, um jede lineare Bewegung zu definieren, der zweite Postprozessor verwendet kartesische Koordinaten, um jede lineare Bewegung zu definieren.