Ein Rückzugsprogramm erstellen
Ähnlich wie bei den vorherigen Operationen:
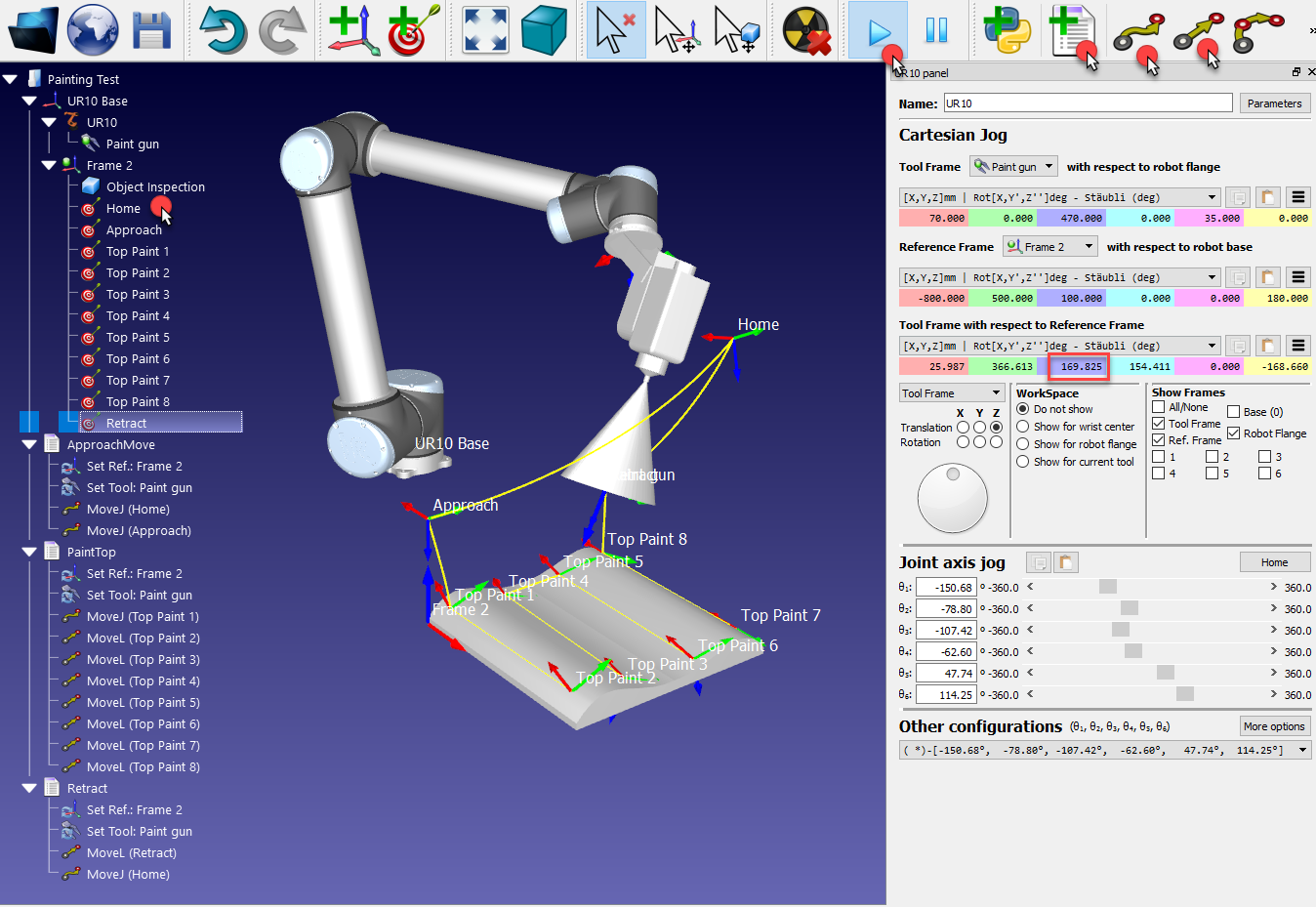
1.Wenn der Roboter am letzten Ziel angekommen ist, bewegen Sie den Roboter nach oben, indem Sie die Z-Koordinate des TCP in Bezug auf das Referenzsystem im Roboterbedienfeld erhöhen (markiertes Kästchen im nächsten Bild).
2.Wählen Sie Program➔
3.Wählen Sie Programm➔

4.Wählen Sie das Ziel Home aus.
5.Wählen Sie Programm➔
Simulieren Sie jedes Programm einzeln, indem Sie darauf doppelklicken. Die Simulation kann beschleunigt werden, indem Sie die Leertaste gedrückt halten oder das Icon Schnelle Simulation auswählen