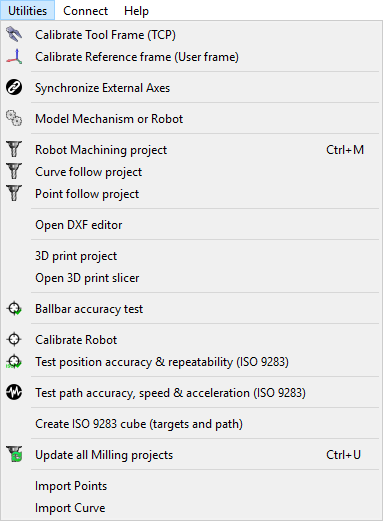
Das Dienstprogramm Menü beinhaltet folgende Optionen:
Werkzeug kalibrieren (TCP) ermöglicht das Kalibrieren eines TCP, indem Daten aus der Realität bereitgestellt werden, z. B. die Achswinkel, um einen Punkt mit verschiedenen Konfigurationen zu erreichen. Dies ist normalerweise bei den meisten Roboter Handprogrammiergeräten verfügbar. RoboDK ermöglicht das Kalibrieren eines TCP mit beliebig vielen Konfigurationen. Durch die Verwendung mehrerer Konfigurationen kann ein genauerer TCP-Wert erhalten werden. Lesen Sie mehr über die TCP Kalibrierung.
Bezugssystem kalibrieren ermöglicht das Identifizieren eines Bezugssystems in Bezug auf eine Roboterbasis. Dies ermöglicht es Realität und Simulation genau abzugleichen. Lesen Sie mehr über Kalibrierung des Bezugssystems.
Externe Achsen synchronisieren ermöglicht das Einrichten einer oder mehrerer externer Achsen als Robotermechanismus. Weitere Informationen finden Sie im Abschnitt Externe Achsen.
Roboter Fräsprojekte können verwendet werden um die Bahn von Werkzeugmaschinen leicht in Roboterprogramme zu konvertieren. RoboDK kann Programme importieren, die für 5-Achs CNC mit CAM-Software erstellt wurden, z. B. generische G-Code- oder APT-Dateien. Diese Programme / Werkzeugwege können mit RoboDK einfach simuliert und in Roboterprogramme umgewandelt werden. Weitere Informationen finden Sie in diesem Abschnitt.
Das Bahnverfolgungs Projekt ähnelt einem Roboter Fräsprojekt, erlaubt aber die Auswahl von Kurven aus der 3D-Geometrie als Werkzeugbahn. Darüber hinaus ist es auch möglich, Punkte zu importieren, um 3D-Kurven aus CSV- oder TXT-Dateien zu importieren. Diese Kurven müssen als eine Liste von XYZ-Punkten und optional IJK-Vektoren bereitgestellt werden. Weitere Informationen finden Sie im Abschnitt Kurven verfolgen.
Das Punktverfolgungs Projekt ist ähnlich wie ein Roboter-Fräs-Projekt. Es ermöglicht aber die Auswahl von Punkten, die aus der 3D-Geometrie extrahiert wurden und somit das einfache Erstellen eines Roboter-Werkzeugwegs. Es ist auch möglich, Punkte zu importieren, um 3D-Punkte aus CSV- oder TXT-Dateien zu importieren. Diese Punkte müssen als eine Liste von XYZ-Punkten und optional IJK-Vektoren bereitgestellt werden. Weitere Informationen finden Sie im Abschnitt Punktverfolgung.
Wählen Sie 3D Druck Projekt, um ein 3D-Druckprogramm für ein bestimmtes Objekt zu erstellen. Das Objekt muss hierzu in der RoboDK-Station verfügbar sein. Die Bahn des 3D Druck Werkzeugs wird im Hintergrund mit einem Slicer in G-Code konvertiert und dann wie ein 3-Achsen Bearbeitungswerkzeugweg behandelt. Weitere Informationen finden Sie im Abschnitt Roboter 3D Druck.
Der Ballbar Genauigkeitstest ermöglicht die Überprüfung der Roboter Performance mit Hilfe eines Teleskop-Doppel-Kugelgelenks. Weitere Informationen über Roboter-Ballbar-Tests finden Sie hier: https://robodk.com/ballbar-test.
Roboter Kalibrieren ermöglicht die Kalibrierung eines Roboters. Somit werden die Genauigkeit des Roboters verbessert und Roboterfehlerparameter gefunden. Ein kalibrierter Roboter kann in jedem RoboDK Offline-Programmierungsprojekt verwendet werden. Die Roboterkalibrierung verbessert normalerweise die Genauigkeit des Roboters je nach Robotermodell um einen Faktor 5 oder besser. Die Roboterkalibrierung erfordert die Verwendung von Messsystemen zur Durchführung von Robotermessungen. Die Genauigkeit und Wiederholbarkeit des Roboters kann vor und/oder nach der Kalibrierung mit ISO9283 getestet werden. Weitere Informationen zur Roboterkalibrierung und zum Leistungstest finden Sie hier: https://robodk.com/robot-calibration.
Anmerkung: Einige dieser Tools benötigen eventuell spezifische Lizenzen, welche die standardmäßige Offline Programmier Lizenz erweitern.