Das Hauptmenü beinhaltet alle verfügbaren Optionen. Es ist in folgende Abschnitte unterteilt:
1.Datei Menü:Ermöglicht es neue Dateien hinzuzufügen (3D Geometrie, Roboter, Werkzeuge, Werkzeugbahnen, …) und des Weiteren das Öffnen und Speichern von RoboDK Projekten (RDK Datei Erweiterung).
2.Bearbeiten Menü:Ermöglicht es ein Objekt oder eine Gruppe von Objekten auszuschneiden/zu kopieren/einzufügen oder Aktionen rückgängig zu machen bzw. wieder zu holen.
3.Programm Menü:Ermöglicht es Roboterprogramme zu erstellen oder zu bearbeiten, sowie weitere Optionen für die Offline Programmierung (OLP).
4.Ansicht Menü:Bietet nützliche Aktionen zum Navigieren im 3D Raum und zum Einrichten bestimmter Ansichten.
5.Extras / Tool Menü:Bietet Tools wie die Kollisionserkennung, Messwerkzeuge oder auch das Öffnen der Hauptoptionen.
6.Dienstprogramm Menü:Ermöglicht das Ausführen spezieller Operationen, wie beispielsweise das Benutzen von Robotern für Fertigungsprozesse, die TCP oder Bezugssystem Kalibrierung oder auch das Verwenden eines Roboters als 3D Drucker oder 5-Achs CNC Maschine, das Kalibrieren eines Roboters,… Diese Operationen benötigen eventuell weitere spezielle Lizenzen.
7.Verbindungs Menü:Ermöglicht es den Roboter mit einem Messsystem oder einer Simulationskamera zu verbinden.
8.Hilfe Menü:Ermöglicht das Öffnen der online Dokumentation (F1), die Suche nach Updates, sowie das Einstellen einer Lizenz.
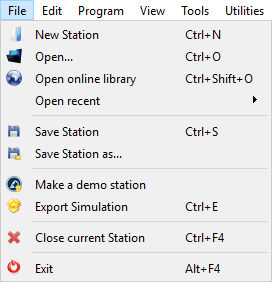
Datei Menu
Es ist möglich Dokumente aus dem Dateimenü zu öffnen, zu speichern oder zu exportieren.
Neue Station fügt eine neue Station zum Baum hinzu. Eine Station kann als RDK Datei geladen oder gespeichert werden. Die RDK Datei (RDK Dateierweiterung) beinhaltet all die Informationen über Roboter und Objekte, die benötigt sind. Es ist daher nicht erforderlich eine weitere Kopie der importierten Daten aufzuheben.
Tipp: Es ist möglich mehr als eine Station geöffnet zu haben. Doppelklicken Sie auf das Stationsicon im Baum, wodurch die Station angezeigt wird.
Öffnen lädt eine neue RoboDK Datei (RDK Station). Des Weiteren kann jedes erkennbare Format, sowie .robot (Roboter Dateien), STEP/IGES/STL (Objekte), .tool (Werkzeuge), etc. importiert werden.
Öffnen der Online Bibliothek öffnet die Onlinebibliothek in einem neuen Fenster.
Sichern der Station sichert die RDK Datei. Wählen Sie Sichern der Station unter… um den Speicherort anzugeben.
Erstellen einer Demostation exportiert die Station als EXE Datei mit einer vereinfachten Version von RoboDK.
Exportieren einer Simulation exportiert ein spezifisches Programm oder einer spezifische Simulation als 3D PDF oder 3D HTML Datei. Beispiel.
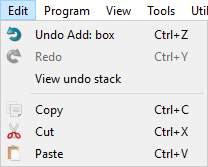
Bearbeitungs Menü
Rückgängig (Strg+Z) und Wiederholen (Strg+Y) können aus dem Bearbeitungsmenü aufgerufen werden. Mithilfe von Rückgängig/Wiederholen lassen sich Änderungen rückgängig machen/wiederherstellen.
Es können ebenfalls die Befehle ausschneiden (Strg+X), kopieren (Strg+C) oder einfügen (Strg+V) auf eines oder eine Gruppe von Objekten aus dem Baum angewendet werden Wenn ein Objekt kopiert wird, werden alle Objekte die diesem untergeordnet sind ebenfalls kopiert.
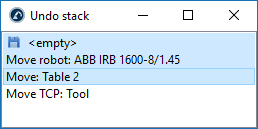
Tipp: Es ist möglich ähnliche Aktionen zu gruppieren. Wenn der Roboter beispielsweise manuell Schritt für Schritt bewegt wird, wird jeder einzelne kleine Schritt aufgenommen (standardmäßig). Um all diese Schritte zu gruppen wählen Sie Extras➔Optionen➔aktivieren Ähnliche Aktionen gruppieren.
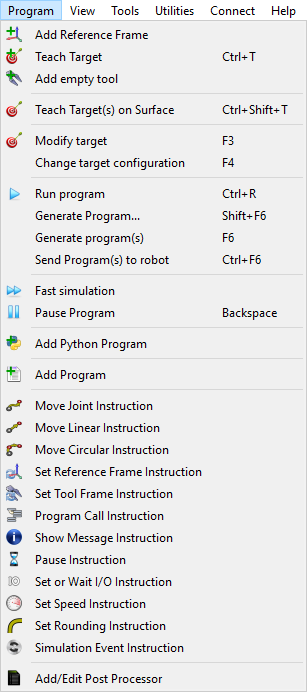
Programm Menü
Das Programmmenü enthält alle Komponenten zur Offline-Programmierung (OLP) und Programmgenerierung. Es ist möglich, Robotern neue Programme, Bezugssysteme, Ziele oder Werkzeuge hinzuzufügen. Diese Offline-Programmierungskomponenten (Bezugssysteme, Tools, Ziele usw.) werden in allen offline generierten Programmen angezeigt.
Ein Bezugssystem hinzufügen fügt ein neues Bezugssystem hinzu, welches dem Ursprung der Station oder einem anderen Bezugssystem untergeordnet wird. Dies hängt davon ab was ausgewählt wurde
Leeres Werkzeug hinzufügen fügt einen neuen TCP zu einem Roboter hinzu. Es wird keine Geometrie benötigt um ein Werkzeug hinzuzufügen. Sie können mit mehreren Werkzeugen auf verschiedene Teile die auf dieses Werkzeug referenziert wurden, verweisen.
Ziel anlernen / teachen (Strg+T) fügt dem aktiven Bezugssystem ein neues Ziel für das aktive Roboter Werkzeug hinzu. Sowohl das aktive Bezugssystem, als auch das aktive Werkzeug können im Roboter Panel ausgewählt werden. Es ist des Weiteren möglich per Klick mit der rechten Maustaste auf ein Bezugssystem oder ein Tool, diese zu aktivieren.
Ziele auf Oberfläche anlernen / teachen (Strg+Shift+T) erlaubt es dem Benutzer Punkte eines Objekts anzuwählen um somit schnell Ziele zu erstellen. Ein Beispiel ist in diesem Abschnitt verfügbar.
Programm hinzufügen fügt ein neues Programm hinzu, welches mit Hilfe des RoboDK Graphical User Interface (GUI) erstellt wird. Hierzu ist keine Programmiererfahrung notwendig, um Roboterprogramme erstellen oder änderen zu können. Das Roboterprogramm kann anschließend einfach simuliert und für einen speziellen Robotertyp automatisch erstellt werden.
Der Abschnitt Programm Anweisungendes Offline Programmierungs Dokument bietet weiterführende Informationen über das GUI an.
Python Programm hinzufügen erlaubt es ein Python-Beispielprogramm / Makro / Skript / Modul in die Station einzufügen, die mit der RoboDK-API verknüpft ist. Ein Python-Programm, das die RoboDK-API verwendet, ermöglicht das Erstellen von Roboterprogrammen aus generischem Programmiercode (Python). Es ist möglich, diese Programme für jede Robotersteuerung spezifisch auszugeben. Des Weiteren ist es auch möglich, bestimmte Aufgaben zu simulieren, um die GUI-Programme zu erweitern. Beispiele hierfür sind Roboter-Unterprogramme für Offline-Programmierung, Online-Programmierung oder auch das Simulieren bestimmter Ereignisse, wie zum Beispiel Objekte automatisch an zufälligen Stellen für eine Pick-and-Place-Simulationen erscheinen lassen. Ein Python-Programm ist wie eine in der Station eingebettete Textdatei und enthält Python-Code, um bestimmte Aufgaben in RoboDK zu automatisieren. Die RoboDK-API wird standardmäßig mit Python bereitgestellt, andere Programmiersprachen können jedoch als Schnittstelle zu RoboDK ebenfalls verwendet werden.
Anmerkung: Der Unterschied zwischen einem normalen Programm (Programm hinzufügen), das mit der grafischen Benutzeroberfläche (GUI) generiert wurde, und einem Python-Programm (Python Programm hinzufügen) ist, dass ersteres keine Programmierkenntnisse erfordert. Auf der anderen Seite erlaubt ein Python-Makro, das die RoboDK-API verwendet, die Grenzen eines Programms zu erweitern.
Des Weiteren ist es möglich, Post Prozessoren hinzuzufügen oder zu bearbeiten. Postprozessoren bestimmen die Art und Weise, wie Programme für eine bestimmte Robotersteuerung generiert werden. Dabei wird die herstellerspezifische Syntax berücksichtigt. Postprozessoren sind die letzte Komponente des Offline-Programmierprozesses.
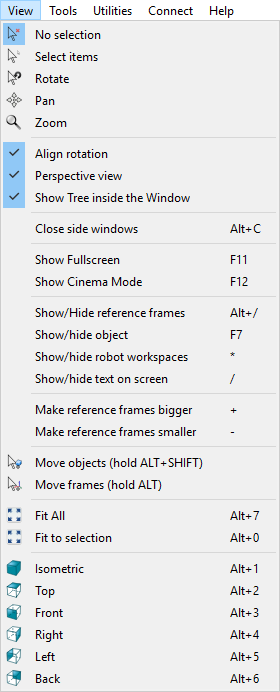
Ansichts Menü
Um im 3D Raum zu navigieren sind Optionen im Ansichts Menü verfügbar. Es ist möglich, aus diesem Menü Objekte zu rotieren, zu verschieben und zu zoomen (dies funktioniert analog durch Klicken mit der rechten Maustaste auf die 3D-Ansicht). Dies ist von Vorteil, wenn mit einem Laptop-Touchpad, anstelle einer Maus, gearbeitet wird.
Um eine freie Drehung in jede beliebige Richtung zu ermöglichen, deaktivieren Sie die Option: Ansicht➔Rotation ausrichten. Andernfalls sperrt RoboDK Referenzen, um die XY-Ebene standardmäßig horizontal zu halten.
Des Weiteren ist es möglich, den Roboterarbeitsbereich ein- oder auszublenden, indem Sie die Sterntaste (*) verwenden. Zwischen sichtbaren und unsichtbaren Objekten kann gewechselt werden, indem Sie die Taste F7 drücken.
Tipp: Sie können die Bezugssysteme vergrößern oder verkleinern, indem Sie mehrmals die + oder - Taste drücken. Wenn viele Elemente sichtbar sind, ist es nützlich, die Größe der Bezugssysteme anzupassen und sie korrekt zu erfassen, wenn sie aus der 3D-Ansicht verschoben werden müssen (z. B. durch gedrückt Halten der ALT-Taste).
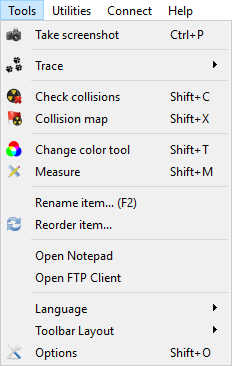
Extras Menü
Generische Werkzeuge stehen im Extras Menü zur Verfügung. Dazu zählen die Optionen Screenshots der 3D Ansicht zu erstellen, die Roboterbahn zu verfolgen, die Kollisionserkennung zu verwenden oder Punktkoordinaten zu messen.
Aktivieren der Spur zeigt die Bahn eines jeden Roboters, wenn er sich bewegt.
Kollisionserkennung aktiviert oder deaktiviert die Kollisionskontrolle. Wenn die Kollisionserkennung aktiviert ist, werden Objekte, die sich in einem Kollisionszustand befinden, rot angezeigt. DieKollisionübersicht ermöglicht die Angabe, welche Objekt-Interaktionen überprüft werden sollen.
Anmerkung: Weitere Informationen bezüglich Kollisionen erhalten Sie aus dem Kapitel Kollisionen.
Farbänderungswerkzeug öffnet ein kleines Fenster, mit dem man die Farbe von Robotern und Objekten ändern kann. Es ist auch möglich, die normalen Vektoren von Oberflächen umzukehren.
Messen zeigt ein Fenster an, in dem Punkte in 3D in Bezug auf ein lokales Basissystem oder den Referenzrahmen der Station gemessen werden können (absolute Messungen).
Sie können die Sprache von RoboDK festlegen, indem Sie Extras➔Sprache auswählen und die gewünschte Sprache auswählen. RoboDK wird sofort in der ausgewählten Sprache angezeigt.
Symbolleisten Stil ermöglicht das Einrichten der Standard-Symbolleiste. Alternativ ist es möglich, die Symbolleiste für grundlegende Aufgaben oder erweiterte Aufgaben anzupassen.
Wählen Sie Optionen, um das Hauptmenü zu öffnen. Weitere Informationen finden Sie im Abschnitt Optionen.
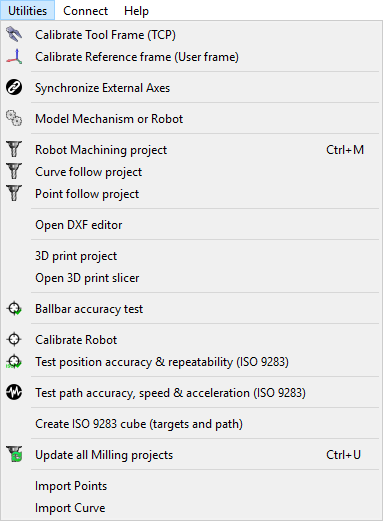
Dienstprogramm Menü
Das Dienstprogramm Menü beinhaltet folgende Optionen:
Werkzeug kalibrieren (TCP) ermöglicht das Kalibrieren eines TCP, indem Daten aus der Realität bereitgestellt werden, z. B. die Achswinkel, um einen Punkt mit verschiedenen Konfigurationen zu erreichen. Dies ist normalerweise bei den meisten Roboter Handprogrammiergeräten verfügbar. RoboDK ermöglicht das Kalibrieren eines TCP mit beliebig vielen Konfigurationen. Durch die Verwendung mehrerer Konfigurationen kann ein genauerer TCP-Wert erhalten werden. Lesen Sie mehr über die TCP Kalibrierung.
Bezugssystem kalibrieren ermöglicht das Identifizieren eines Bezugssystems in Bezug auf eine Roboterbasis. Dies ermöglicht es Realität und Simulation genau abzugleichen. Lesen Sie mehr über Kalibrierung des Bezugssystems.
Externe Achsen synchronisieren ermöglicht das Einrichten einer oder mehrerer externer Achsen als Robotermechanismus. Weitere Informationen finden Sie im Abschnitt Externe Achsen.
Roboter Fräsprojekte können verwendet werden um die Bahn von Werkzeugmaschinen leicht in Roboterprogramme zu konvertieren. RoboDK kann Programme importieren, die für 5-Achs CNC mit CAM-Software erstellt wurden, z. B. generische G-Code- oder APT-Dateien. Diese Programme / Werkzeugwege können mit RoboDK einfach simuliert und in Roboterprogramme umgewandelt werden. Weitere Informationen finden Sie in diesem Abschnitt.
Das Bahnverfolgungs Projekt ähnelt einem Roboter Fräsprojekt, erlaubt aber die Auswahl von Kurven aus der 3D-Geometrie als Werkzeugbahn. Darüber hinaus ist es auch möglich, Punkte zu importieren, um 3D-Kurven aus CSV- oder TXT-Dateien zu importieren. Diese Kurven müssen als eine Liste von XYZ-Punkten und optional IJK-Vektoren bereitgestellt werden. Weitere Informationen finden Sie im Abschnitt Kurven verfolgen.
Das Punktverfolgungs Projekt ist ähnlich wie ein Roboter-Fräs-Projekt. Es ermöglicht aber die Auswahl von Punkten, die aus der 3D-Geometrie extrahiert wurden und somit das einfache Erstellen eines Roboter-Werkzeugwegs. Es ist auch möglich, Punkte zu importieren, um 3D-Punkte aus CSV- oder TXT-Dateien zu importieren. Diese Punkte müssen als eine Liste von XYZ-Punkten und optional IJK-Vektoren bereitgestellt werden. Weitere Informationen finden Sie im Abschnitt Punktverfolgung.
Wählen Sie 3D Druck Projekt, um ein 3D-Druckprogramm für ein bestimmtes Objekt zu erstellen. Das Objekt muss hierzu in der RoboDK-Station verfügbar sein. Die Bahn des 3D Druck Werkzeugs wird im Hintergrund mit einem Slicer in G-Code konvertiert und dann wie ein 3-Achsen Bearbeitungswerkzeugweg behandelt. Weitere Informationen finden Sie im Abschnitt Roboter 3D Druck.
Der Ballbar Genauigkeitstest ermöglicht die Überprüfung der Roboter Performance mit Hilfe eines Teleskop-Doppel-Kugelgelenks. Weitere Informationen über Roboter-Ballbar-Tests finden Sie hier: https://robodk.com/ballbar-test.
Roboter Kalibrieren ermöglicht die Kalibrierung eines Roboters. Somit werden die Genauigkeit des Roboters verbessert und Roboterfehlerparameter gefunden. Ein kalibrierter Roboter kann in jedem RoboDK Offline-Programmierungsprojekt verwendet werden. Die Roboterkalibrierung verbessert normalerweise die Genauigkeit des Roboters je nach Robotermodell um einen Faktor 5 oder besser. Die Roboterkalibrierung erfordert die Verwendung von Messsystemen zur Durchführung von Robotermessungen. Die Genauigkeit und Wiederholbarkeit des Roboters kann vor und/oder nach der Kalibrierung mit ISO9283 getestet werden. Weitere Informationen zur Roboterkalibrierung und zum Leistungstest finden Sie hier: https://robodk.com/robot-calibration.
Anmerkung: Einige dieser Tools benötigen eventuell spezifische Lizenzen, welche die standardmäßige Offline Programmier Lizenz erweitern.
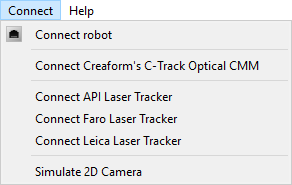
Verbindungs Menü
Es ist möglich, sich mit einem Roboter zu verbinden und die Verbindungsparameter einzugeben, z. B. die IP-Adresse des Roboters, den FTP-Benutzernamen und das FTP-Passwort. Das Einrichten einer Roboterverbindung ermöglicht das Übertragen von Programmen über FTP oder das Ausführen von Programmen direkt vom PC. Dies ist für bestimmte Roboter über unterstützte Robotertreiber in RoboDK möglich. Neue Robotertreiber können von Endbenutzern entwickelt werden, weitere Informationen finden Sie im Bereich Robotertreiber.
Des Weiteren ist es auch möglich, eine Verbindung zu unterstützten Messsystemen wie Laser Tracker oder Creaform Optical CMM herzustellen. Dies ermöglicht eine vollständige Automatisierung der Roboterkalibrierung und des Leistungstests.
Hilfe Menü
Hilfe (F1) öffnet diese Onlinedokumentation. Eine PDF Version ist für jedes Kapitel einzeln erhältlich (oben). Durch Drücken von F1 zeigt RoboDK die Hilfe, welche zum aktuell ausgewählten Objekt passt.
Wählen Sie Nach Updates suchen… aus, um zu prüfen, ob ein Update verfügbar ist. Eine Meldung mit einem empfohlenen Update wird angezeigt, wenn eines verfügbar ist. Ansonsten werden Sie darauf hingewiesen, dass die aktuelle Version bereits auf dem neuesten Stand ist. Wenn keine Nachricht erscheint, bedeutet dies, dass eine Firewall die Kommunikation zwischen RoboDK und dem Internet blockiert.