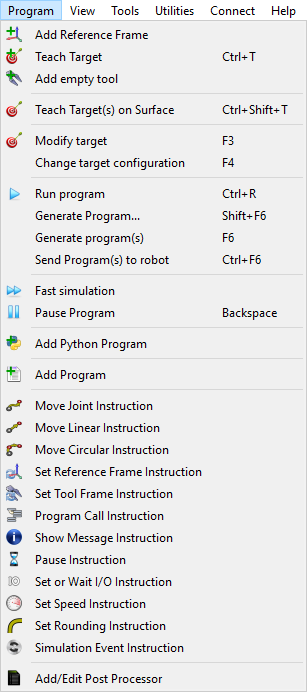
Das Programmmenü enthält alle Komponenten zur Offline-Programmierung (OLP) und Programmgenerierung. Es ist möglich, Robotern neue Programme, Bezugssysteme, Ziele oder Werkzeuge hinzuzufügen. Diese Offline-Programmierungskomponenten (Bezugssysteme, Tools, Ziele usw.) werden in allen offline generierten Programmen angezeigt.
Ein Bezugssystem hinzufügen fügt ein neues Bezugssystem hinzu, welches dem Ursprung der Station oder einem anderen Bezugssystem untergeordnet wird. Dies hängt davon ab was ausgewählt wurde
Leeres Werkzeug hinzufügen fügt einen neuen TCP zu einem Roboter hinzu. Es wird keine Geometrie benötigt um ein Werkzeug hinzuzufügen. Sie können mit mehreren Werkzeugen auf verschiedene Teile die auf dieses Werkzeug referenziert wurden, verweisen.
Ziel anlernen / teachen (Strg+T) fügt dem aktiven Bezugssystem ein neues Ziel für das aktive Roboter Werkzeug hinzu. Sowohl das aktive Bezugssystem, als auch das aktive Werkzeug können im Roboter Panel ausgewählt werden. Es ist des Weiteren möglich per Klick mit der rechten Maustaste auf ein Bezugssystem oder ein Tool, diese zu aktivieren.
Ziele auf Oberfläche anlernen / teachen (Strg+Shift+T) erlaubt es dem Benutzer Punkte eines Objekts anzuwählen um somit schnell Ziele zu erstellen. Ein Beispiel ist in diesem Abschnitt verfügbar.
Programm hinzufügen fügt ein neues Programm hinzu, welches mit Hilfe des RoboDK Graphical User Interface (GUI) erstellt wird. Hierzu ist keine Programmiererfahrung notwendig, um Roboterprogramme erstellen oder änderen zu können. Das Roboterprogramm kann anschließend einfach simuliert und für einen speziellen Robotertyp automatisch erstellt werden.
Der Abschnitt Programm Anweisungendes Offline Programmierungs Dokument bietet weiterführende Informationen über das GUI an.
Python Programm hinzufügen erlaubt es ein Python-Beispielprogramm / Makro / Skript / Modul in die Station einzufügen, die mit der RoboDK-API verknüpft ist. Ein Python-Programm, das die RoboDK-API verwendet, ermöglicht das Erstellen von Roboterprogrammen aus generischem Programmiercode (Python). Es ist möglich, diese Programme für jede Robotersteuerung spezifisch auszugeben. Des Weiteren ist es auch möglich, bestimmte Aufgaben zu simulieren, um die GUI-Programme zu erweitern. Beispiele hierfür sind Roboter-Unterprogramme für Offline-Programmierung, Online-Programmierung oder auch das Simulieren bestimmter Ereignisse, wie zum Beispiel Objekte automatisch an zufälligen Stellen für eine Pick-and-Place-Simulationen erscheinen lassen. Ein Python-Programm ist wie eine in der Station eingebettete Textdatei und enthält Python-Code, um bestimmte Aufgaben in RoboDK zu automatisieren. Die RoboDK-API wird standardmäßig mit Python bereitgestellt, andere Programmiersprachen können jedoch als Schnittstelle zu RoboDK ebenfalls verwendet werden.
Anmerkung: Der Unterschied zwischen einem normalen Programm (Programm hinzufügen), das mit der grafischen Benutzeroberfläche (GUI) generiert wurde, und einem Python-Programm (Python Programm hinzufügen) ist, dass ersteres keine Programmierkenntnisse erfordert. Auf der anderen Seite erlaubt ein Python-Makro, das die RoboDK-API verwendet, die Grenzen eines Programms zu erweitern.
Des Weiteren ist es möglich, Post Prozessoren hinzuzufügen oder zu bearbeiten. Postprozessoren bestimmen die Art und Weise, wie Programme für eine bestimmte Robotersteuerung generiert werden. Dabei wird die herstellerspezifische Syntax berücksichtigt. Postprozessoren sind die letzte Komponente des Offline-Programmierprozesses.