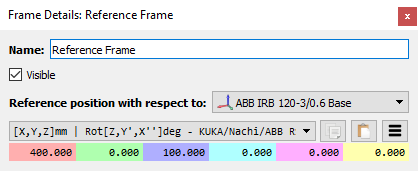
Reference Frame
Doppelklicken Sie auf ein Bezugssystem
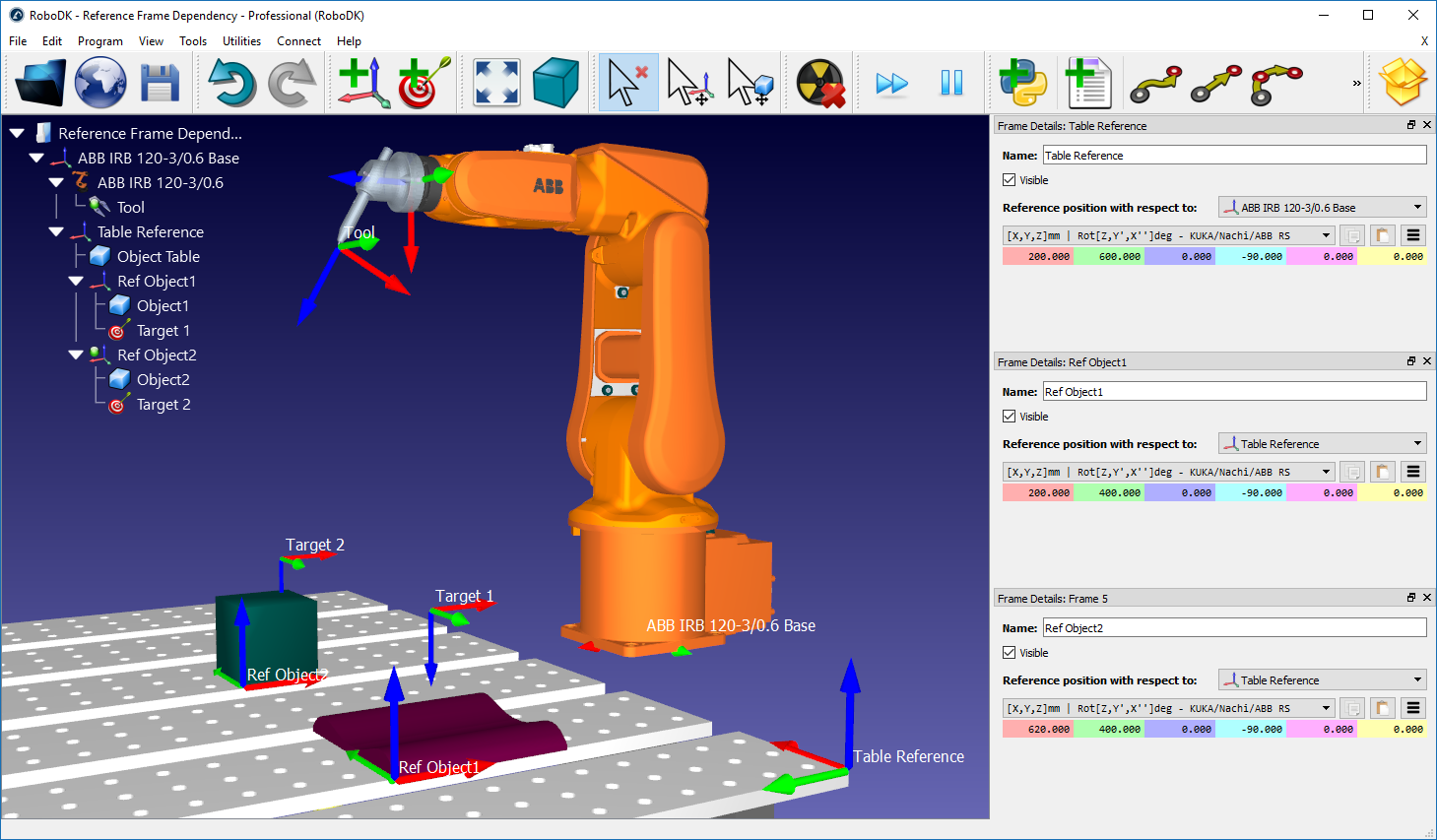
Mehrere Bezugssysteme können miteinander verknüpft werden, um die Abhängigkeit zu erstellen, die der Realität entspricht. Zum Beispiel kann ein Tisch eine bestimmte Position in Bezug auf/Abhängigkeit von dem Roboter haben. Dann können zwei oder mehr Objekte auf dem Tisch eine bestimmte Position in Bezug auf das Bezugssystem des Tischs haben. Das Verschieben des Tisch Bezugssystems verändert die Beziehung zwischen den Objekten und dem Tisch nicht, sondern ändert dabei lediglich die Beziehung aller Objekte in Bezug auf den Roboter. Das folgende Bild zeigt ein solches Beispiel.