Roboter Konfigurationen
Eine Roboterkonfiguration definiert einen bestimmten Zustand des Roboters. Um die Konfiguration zu ändern, muss eine Singularität ausgeschlossen werden. Robotersteuerungen können eine Singularität nicht überschreiten, wenn eine lineare Bewegung ausgeführt wird (Point to Point (PTP) Bewegung wäre dafür erforderlich). Mit anderen Worten, um eine lineare Bewegung zwischen zwei Zielen zu erreichen, muss die Roboterkonfiguration für die gesamte Bewegung dieselbe sein, einschließlich der ersten und letzten Punkte.
Klicken Sie mit der rechten Maustaste auf einen Roboter und wählen Sie Konfiguration ändern aus, um das Fenster mit den Roboterkonfigurationen zu öffnen. Ebenfalls ist es möglich, dieses Fenster zu öffnen, indem Sie im Roboter Panel Weitere Optionen auswählen.
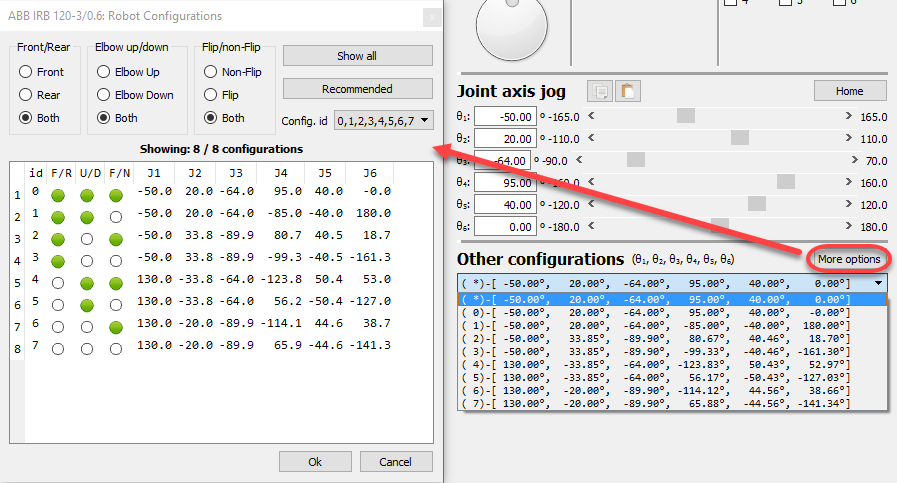
Ein Standard 6-Achs Roboter hat normalerweise 8 verschiedene Konfigurationen für jede Position des Roboters. Dies setzt die Annahme voraus, dass sich jede Roboterachse um volle Umdrehung ausführen kann. In der Praxis können die Gelenkendwerte abhängig vom Robotertyp mehr oder weniger eingeschränkt sein. Daher kann es möglich sein, zwischen 1 bis zu mehr als 100 verschiedene Roboterkonfigurationen für ein bestimmtes Ziel, abhängig vom Roboter, zu haben.
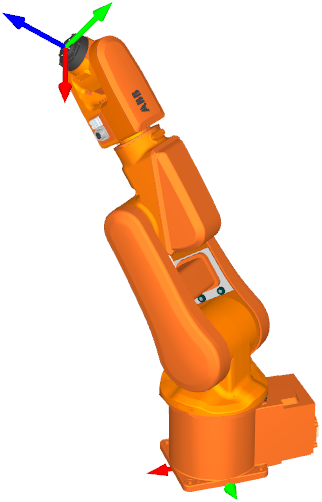
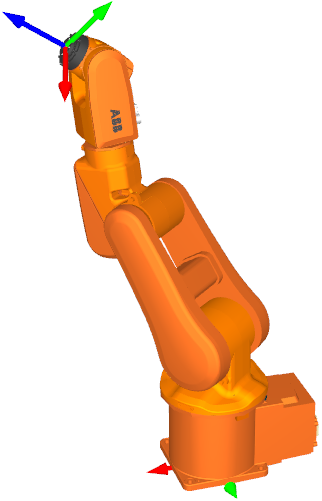
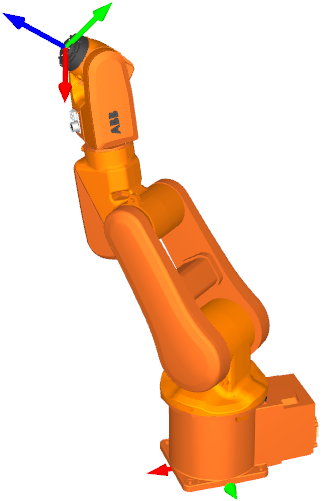
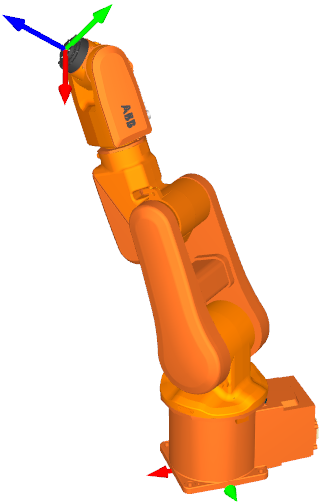
Die Roboterkonfiguration beschreibt eine bestimmte Art (Montagemodus) zum Erreichen einer Position mit dem Roboter. Zum Beispiel kann der Roboter seinen Ellenbogen nach oben oder Ellenbogen nach unten (Up vs. Down oder U / D) haben, gleichzeitig kann er dem Ziel zugewandt sein oder die Basis kann sich um 180 Grad drehen, um das Ziel rückwärts zu erreichen (Vorne vs. Hinten oder F / R). Des Weiteren kann das Gelenk 5 durch Umschalten des Vorzeichens „flippen“, während die Achse 4 und die Achse 6 diese Bewegung kompensieren (Flip vs. Non-Flip oder F / N). Daraus ergeben sich die Konfigurationen 2 * 2 * 2 = 8.