Roboter Panel
Ein Doppelklick auf einen Roboter im Strukturbaum oder der 3D Ansicht öffnet das Roboter Panel.
Es ist möglich die Achsen des Roboters innerhalb des Achswinkel-Dialogs zu verändern und spezifische Werte einzugeben. Diese Werte und die Roboter Position stimmen mit der des Roboter Controllers überein. Doppelklicken Sie auf die Grenzwerte der Achswinkel, um diese zu bearbeiten. Standardmäßig verwendet RoboDK die Hardware Limits des Roboter Herstellers. Manche Anwendungen benötigen evtl. engere Achslimits (Software Limits). Die Gelenkwinkel Werte können kopiert 

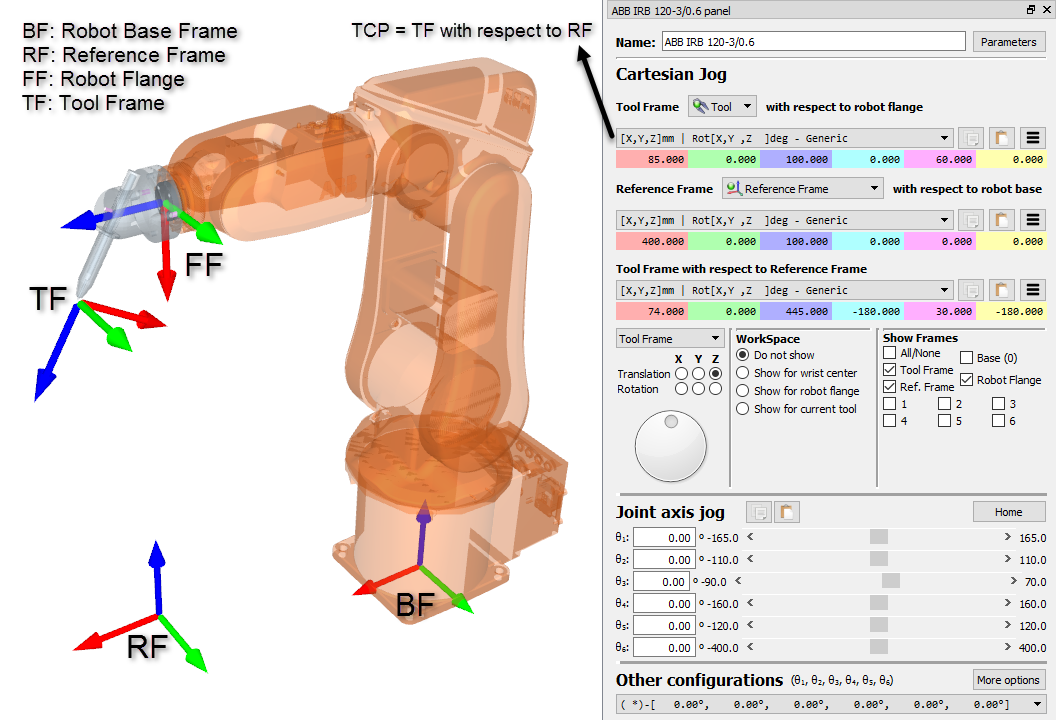
Der kartesische Bereich zeigt alle Informationen bezüglich der Roboterkinematik an:
●Das Bezugssystem des Werkzeugs (TF) in Bezug zum Roboter Flansch (FF) definiert wo sich das gewählte Werkzeug in Bezug zum Roboterflansch befindet. Der Roboterflansch ist immer identisch, das Bezugssystem des Werkzeugs hingegen ändert sich je nach montiertem Tool. Diese Beziehung ist innerhalb der meisten Robotersteuerungen auch als UTOOL, ToolDate oder auch nur Tool bekannt. Das Roboter Werkzeug ist auch als TCP (Tool Center Point) bekannt. Das ausgewählte Werkzeug wird das aktive Werkzeug. Es wird benutzt, wenn neue Ziele und Programme erstellt werden. Das ausgewählte Werkzeug hat darüber hinaus eine grüne Markierung in seinem Icon an: 
●Das Bezugssystem (RF) in Bezug zur Roboter Basis (BF) definiert wo sich das Bezugssystem in Bezug zur Roboter Basis befindet. Die Roboter Basis bewegt sich nie. Trotzdem können verschiedene Bezugssysteme verwendet werden um Objekte in Bezug zur Roboter Basis zu positionieren. Diese Beziehung ist innerhalb der meisten Robotersteuerungen auch als UFRAME, WorkObject MFRAME oder Reference bekannt. Das gewählte Bezugssystem im Roboter Panel wird das aktive Bezugssystem. Das aktive Bezugssystem wird als Bezug für neue Ziele und Roboterprogramme verwendet Das ausgewählte Bezugssystem hat darüber hinaus eine grüne Markierung in seinem Icon: 
●Das Werkzeug Bezugssystem (TF) in Bezug zum (allgemeinen) Bezugssystem (RF) zeigt die Position des aktiven TCP in Bezug zum aktiven, allgemeinen Bezugssystem, für die aktuelle Roboterposition. Ändern Sie diesen Wert, um den Roboter zu bewegen. Die Achswinkel werden automatisch errechnet. Die kartesischen Koordinaten werden aufgenommen, sobald ein neues Ziel erstellt wurde (Programm ➔ Ziel anlernen/teachen). Das Ziel ist ebenfalls in Beziehung mit dem aktiven Bezugssystem.
Eine Liste der möglichen Konfigurationen ist im Abschnitt andere Konfigurationen verfügbar. Die Konfiguration des Roboters beschreibt einen spezifischen Status des Roboters ohne Singularitäten zu streichen. Ändern der Konfiguration erfordert das Streichen einer Singularität. Weitere Informationen im Abschnitt Roboter Konfigurationen.
Schließlich können Sie mit der Schaltfläche "Parameter" oben rechts einige kinematische Anpassungen vornehmen, den bevorzugten Postprozessor auswählen oder sich nach einer Roboterkalibrierung genaue Parameter ausgeben lassen. Eine Änderung dieser Werte sollte nur unter bestimmten Umständen erforderlich sein.