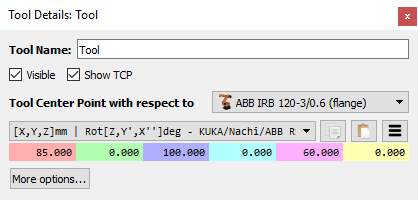
Roboter Werkzeug (TCP)
Doppelklicken Sie auf das Roboterwerkzeug 
Anmerkung: Der TCP kann auch vom Roboter Panelaus geändert werden.
Wählen Sie Weitere Optionen… um eine Skalierung der Geometrie des Werkzeugs vorzunehmen, oder die Geometrie in Bezug zum Roboterflansch zu bewegen. Ein Ändern dieser Werte hat keinen Einfluss auf das Roboterprogramm. Die Geometrie wird lediglich für die grafische Ausgabe, sowie die Kollisionserkennung genutzt. (Den TCP intakt halten).
Tipp: Es ist möglich, die Position des TCP in Bezug auf einen anderen TCP bereitzustellen, indem dieser Referenz-TCP anstelle des Roboterflansches ausgewählt wird. Zum Beispiel kann ein Schneidwerkzeug in einem bestimmten Abstand entlang der Z-Achse in Bezug auf einen anderen TCP, welcher die Spindel darstellt, definiert werden. Dieses Beispielenthält weitere Details.