Roboter Ziele
Roboter Ziele erlauben es spezielle Roboterpositionen aufzunehmen, sodass der Roboter zu einer bestimmten Position bewegt werden kann. Um solche Ziele hinzuzufügen sehen Sie sich die nachfolgenden Informationen an:
●Wählen Sie Programm➔
Dadurch wird die aktuelle Position des Roboters gespeichert, indem das aktuell aktive allgemeine Bezugssystem 

●Rechtsklicken Sie auf das Ziel und wählen Sie anschließend weitere Optionen… (F3) um die aufgenommene Position, sowie die Achswinkel zu sehen.
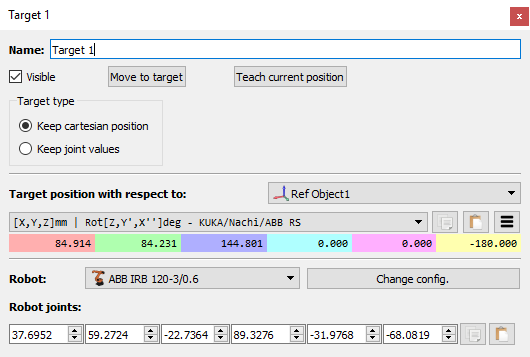
Durch Erstellen eines neuen Ziels werden der TCP in Bezug auf das Bezugssystem im kartesischen Raum sowie die aktuellen Roboterachsen aufgezeichnet. Standardmäßig erstellt RoboDK Ziele als kartesische Ziele (kartesische Position beibehalten
Des Weiteren ist es möglich, das Ziel in Achswinkeln anzugeben(achsspezifische Position beibehalten
Es ist üblich, achsspezifische Ziele zu verwenden, um eine erste Annäherungsposition des Arbeitsbereichs zu erreichen. Anschließend stellen kartesische Ziele sicher, dass die Werkzeugbahn nicht geändert wird, wenn das Bezugssystem oder das Werkzeugbezugssystem geändert werden.
Es ist möglich, andere Konfigurationen zu sehen, mit welchen der Roboter dieselbe Position erreicht. Weitere Informationen hierzu im nächsten Abschnitt