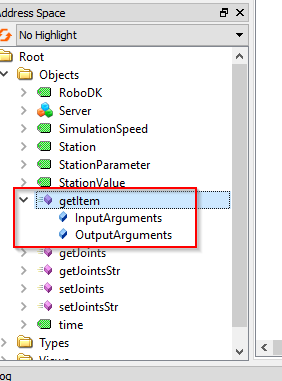
Methoden
RoboDK OPC UA Server verfügt auch über einige Methoden, mit denen der Benutzer dynamisch auf die Daten der RoboDK Station zugreifen kann.
Wir können einfach mit der rechten Maustaste auf die Methode>Aufrufen klicken, um die Methode auszuführen.
getItem
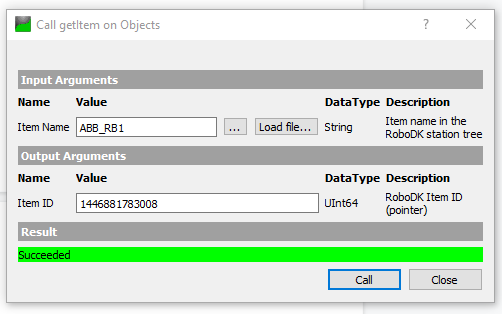
getItem ist eine Methode, die es dem Benutzer ermöglicht, den Zeiger Ihres Elements zu erhalten.
Für die InputArgumente ist der Gerätename erforderlich. Sie können sich vorstellen, dass der Gerätename Ihr Stationsname, Robotername usw. ist. Und Item ID ist das OutputArgument, das den Zeiger des Geräts zurückgibt.
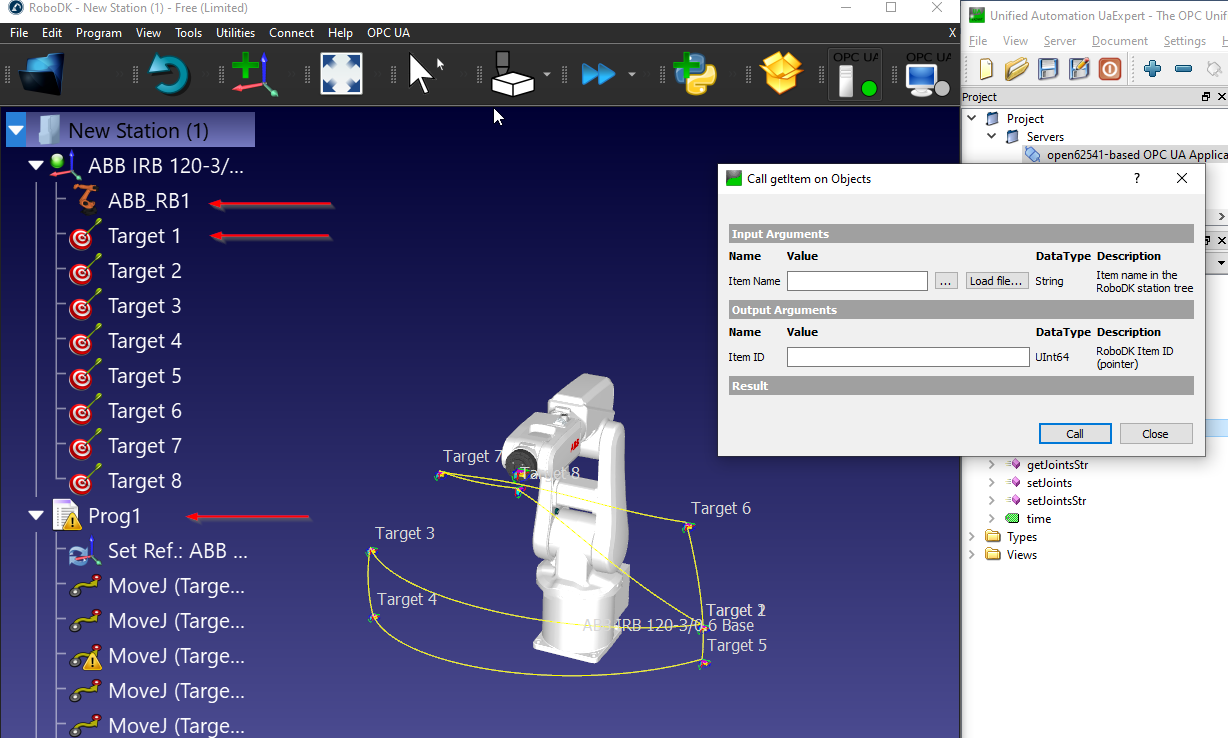
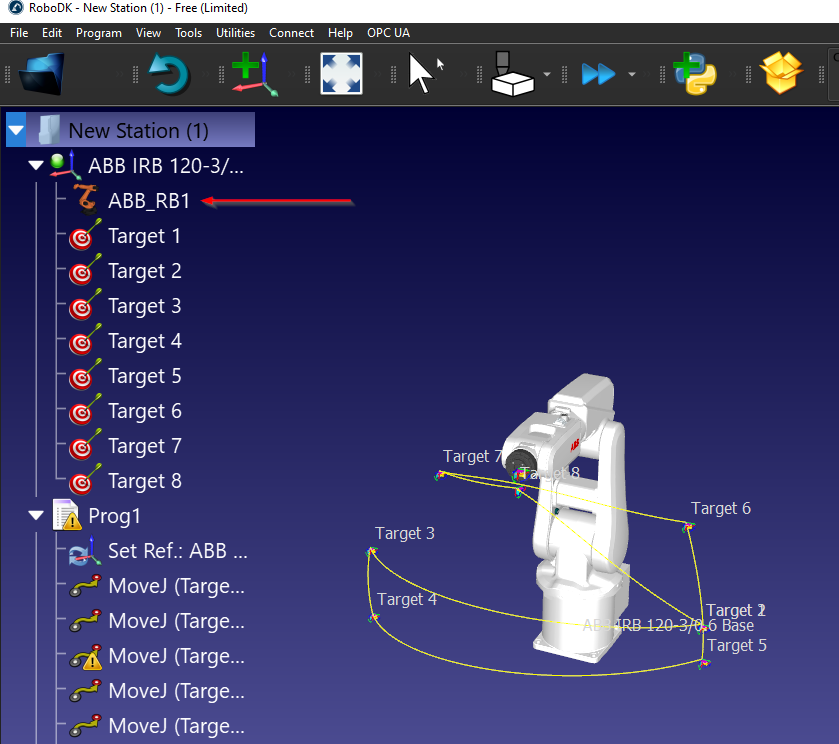
In diesem Beispiel habe ich die Element-ID (Pointer) meines ABB-Roboters mit dem Namen "ABB_RB1" erhalten.
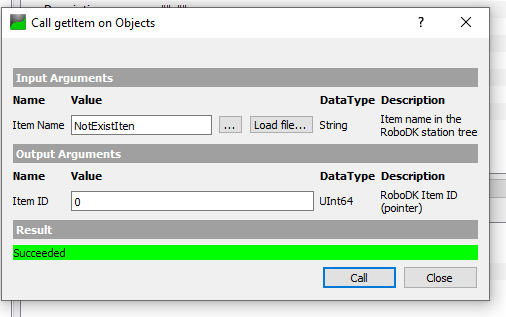
0 wird zurückgegeben, wenn der Objektname ungültig ist oder in Ihrer Station nicht existiert.
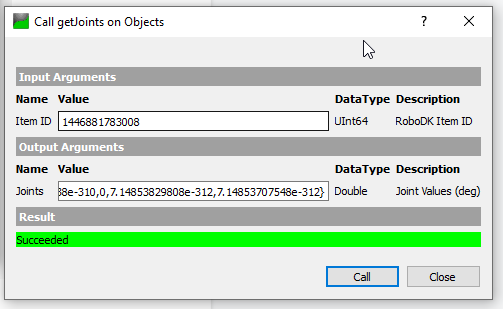
getJoints
getJonits ist eine Methode, mit der der Benutzer den Gelenkwert des Roboters von der Station abrufen kann, basierend auf der Item ID.
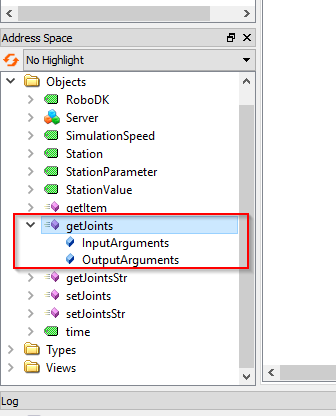
Die Item ID ist der Zeigerwert Ihres Items, den Sie über die Methode getItem() abrufen können.
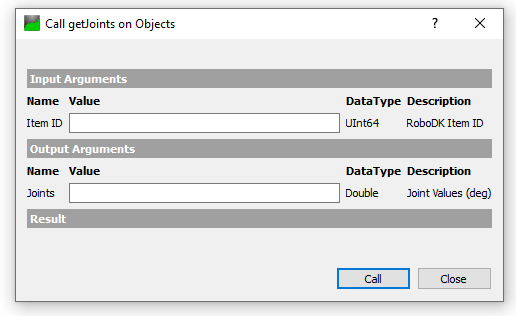
Wir erhalten die Objekt-ID mit dem Objektnamen "ABB_RB1", und es wird ein UInt64-Wert zurückgegeben.
Der Wert von Joints wird zurückgegeben, wenn Sie die Item ID in der Methode übergeben, die wir im vorherigen Abschnitt erhalten haben.
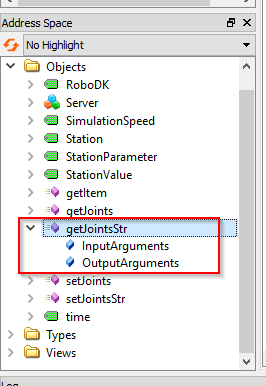
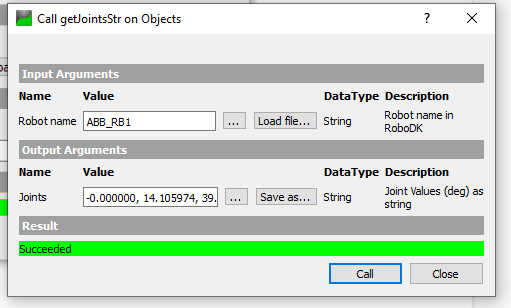
getJointsStr
getJointsStr ist eine Methode, die es dem Benutzer ermöglicht, den Wert Joints auf der Grundlage eines String-Wertes zu erhalten.
Wir können den Roboternamen (String) in dieser Methode übergeben.
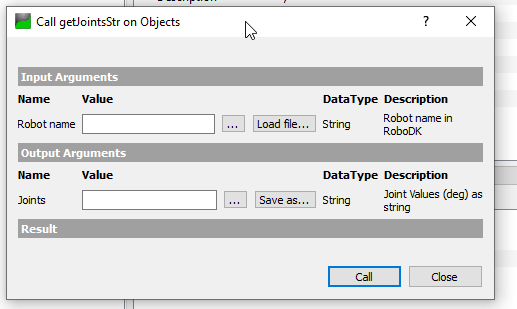
In Meine Station ist ABB_RB1 der Name meines Roboters.
Wir können einfach "ABB_RB1" im Parameter Robotername übergeben und die Methode aufrufen - der gemeinsame Wert im String-Format wird zurückgegeben.
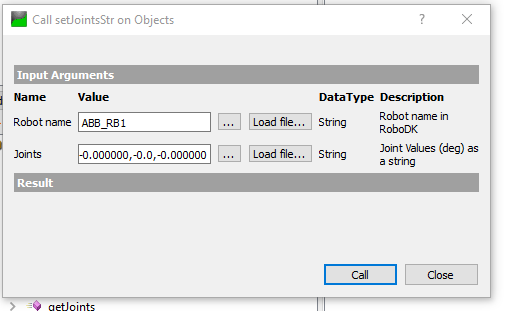
setJointsStr
setJointsStr ist eine Methode, mit der der Benutzer den Joints-Wert des Roboters auf der Grundlage eines String-Wertes festlegen kann.
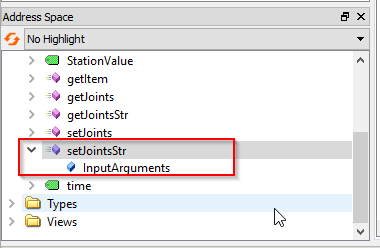
Im Roboternamen wird ABB_RB1 übergeben, und im Parameter Joints können wir einfach eine Zeichenkette mit dem Gelenkwert übergeben.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000