OPC UA Client Beispiel
Dieses Beispiel zeigt Ihnen, wie Sie RoboDK eine OPC-UA Client-Konnektivität hinzufügen können. RoboDK enthält ein OPC-UA Add-in, mit dem Sie Ihre RoboDK Projekte um OPC UA Kompatibilität erweitern können.
In diesem Beispiel erfahren Sie, wie Sie die Daten von der RoboDK Station über den OPC UA Client abrufen können.
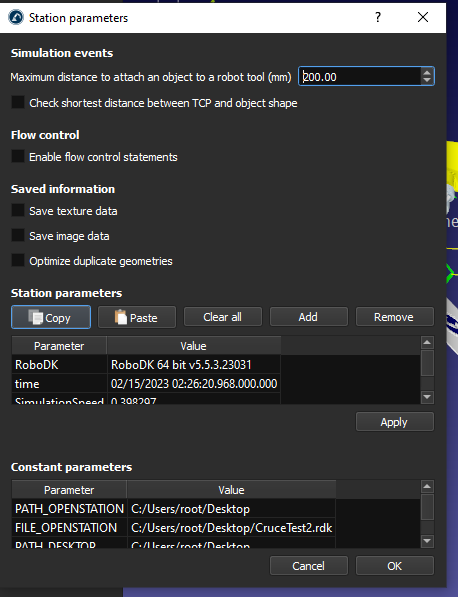
Hinweis: Sie können die Stationsparameter löschen, indem Sie mit der rechten Maustaste auf das Stammverzeichnis der Station klicken und Stationsparameter wählen.
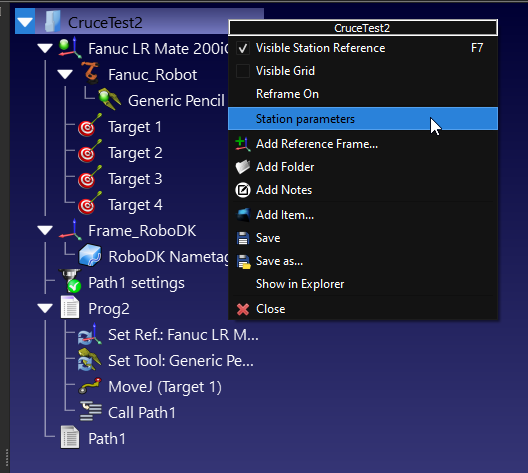
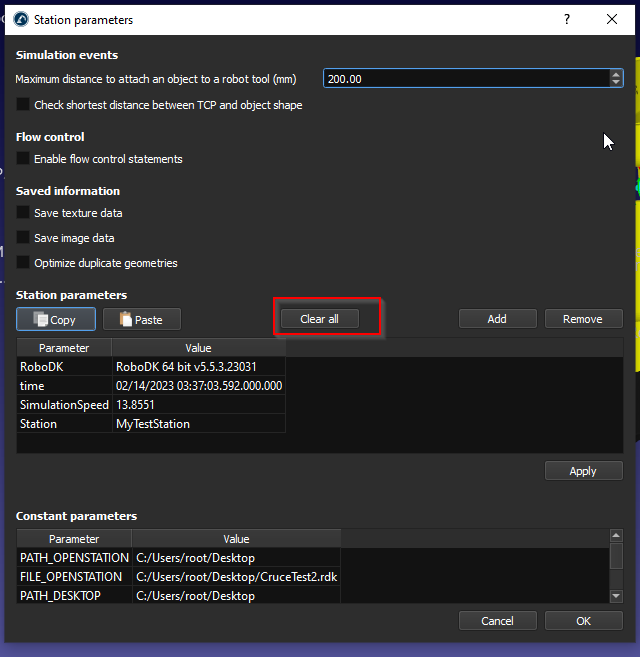
Der Bildschirm mit den Stationsparametern wird angezeigt. Drücken Sie "Alle löschen", um alle Stationsparameter zu löschen.
Implementierung mit Schnittstelle
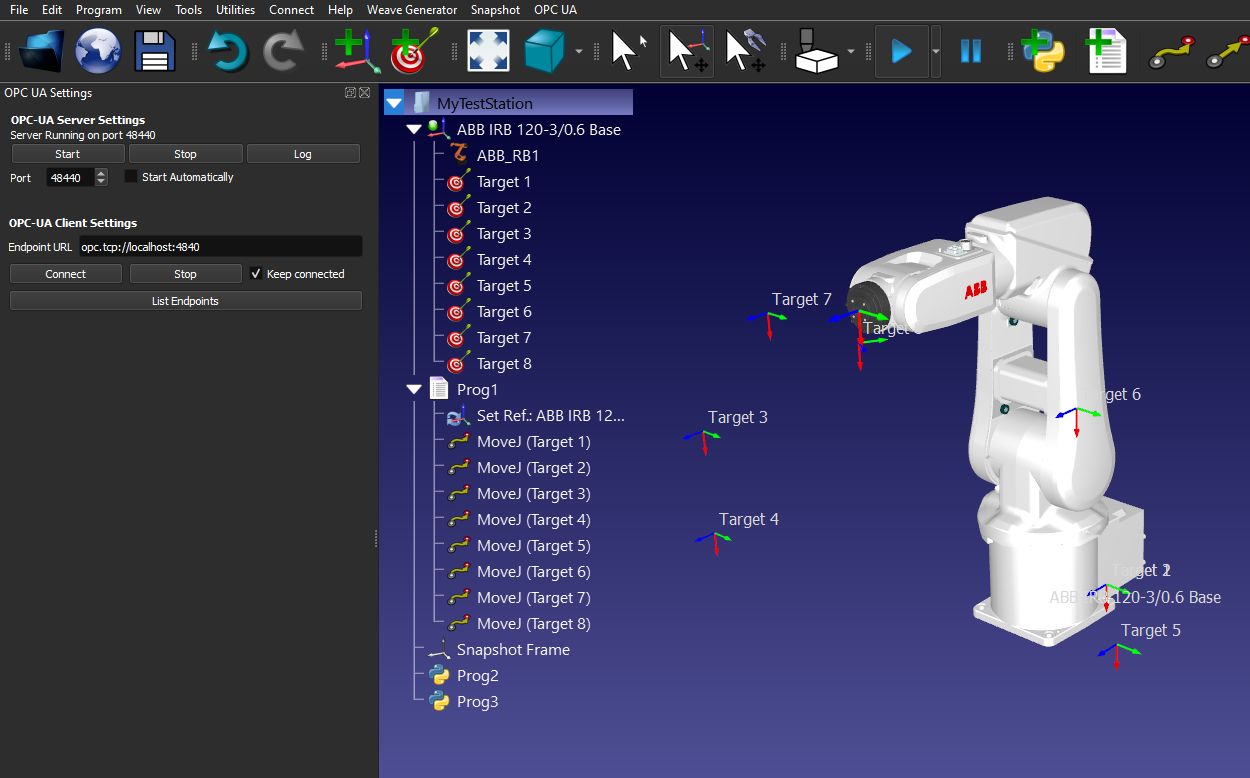
Wir können ein weiteres RoboDK Projekt erstellen, in dem der OPC UA Server konfiguriert und gestartet ist.
Add-in Client
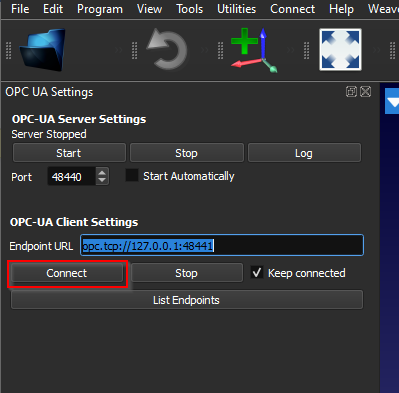
Dieser Abschnitt zeigt, wie Sie einen OPC UA Client hinzufügen.
Geben Sie die Endpunkt-URL ein, zum Beispiel: opc.tcp://127.0.0.1:48441.
Sie müssen die IP-Adresse und die Port-Konfiguration an Ihren Ziel-OPC-UA-Server anpassen.
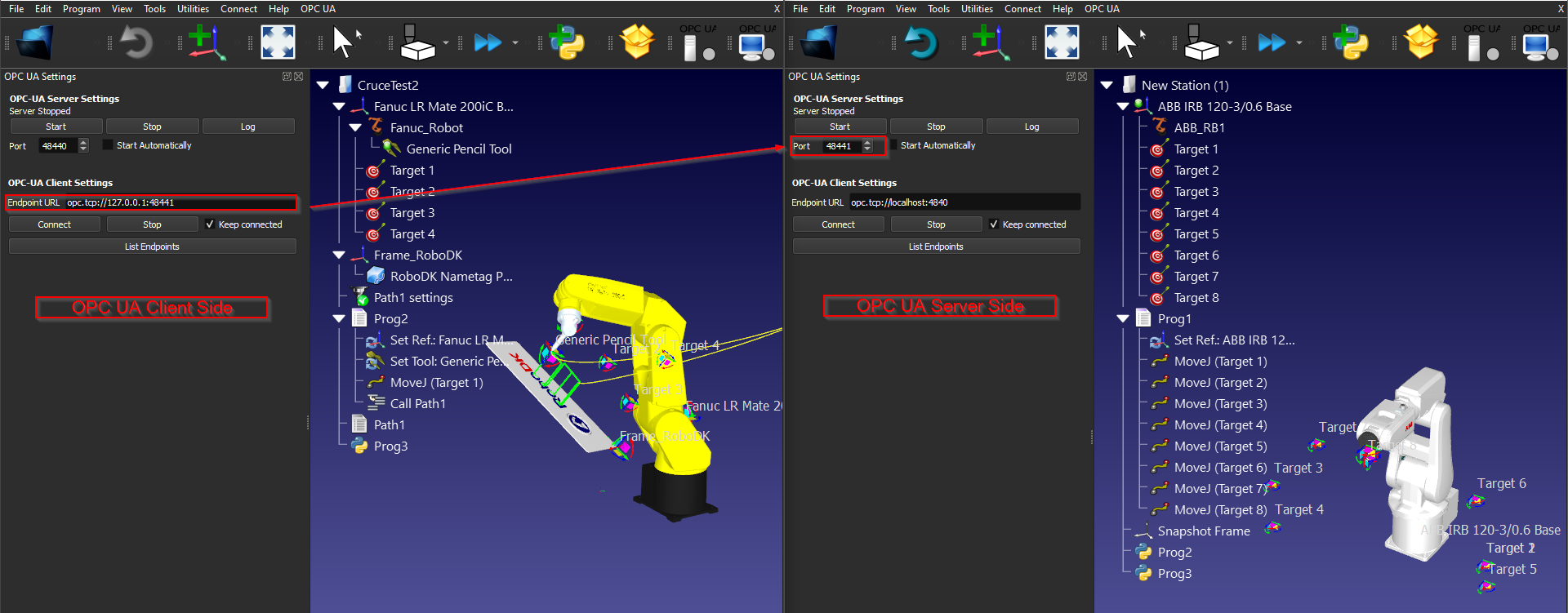
Drücken Sie "Verbinden", um die Verbindung herzustellen.
wenn die Meldung" Servervariablen abgerufen. Klicken Sie mit der rechten Maustaste auf das Stationsobjekt und wählen Sie 'Stationsparameter', um die Variablen zu sehen.", ist die Verbindung hergestellt.
Klicken Sie mit der rechten Maustaste auf Ihre Station und wählen Sie "Stationsparameter".

Client-Knoten
Sie können die Details jedes Knotens im Bereich Knoten überprüfen.
Implementierung mit der RoboDK API
Nachdem Sie die Daten der Knoten vom OPC UA Server über den OPC UA Client in RoboDK erhalten haben, können Sie diese Daten auch über die RoboDK-Python-API abrufen.
Installation
Sie können diesen Link verwenden, um die RoboDK Python-API zu installieren.
https://robodk.com/doc/en/PythonAPI/intro.html#how-to-install
Oder installieren Sie das Paket robodk für Python manuell:
pip install robodk
Skript
Dieses Beispielskript zeigt, wie Sie die Stationsparameter über die Python-API von RoboDK abrufen können.
from robodk import robolink # RoboDK API
RDK = robolink.Robolink()
from robodk import * # RoboDK API
from robolink import * # Roboter-Werkzeugkasten
Artikelliste = RDK.Artikelliste()
if itemlist:
# Alle Stationsparameter abrufen
print('Vaild Paramaters sind in Ihrer Station konfiguriert...')
StationParameter=RDK.getParams()
für StationParameter in StationParameter:
print("Station Parameter %s : %s"%(StationParameter[0],str((StationParameter[1]))))
sonst:
print('Keine Parameterliste..')
Hier sehen Sie das Ergebnis des Beispielskripts:
Vaild Paramaters werden in Ihrer Station konfiguriert...
Stationsparameter RoboDK : RoboDK 64 bit v5.5.3.23031
Station Parameter Zeit : 02/14/2023 03:58:29.191.000.000
Station Parameter SimulationGeschwindigkeit : 13.8551
Stationsparameter Station : MyTestStation