Navigation offcanvas
- Grundlagen
- Einführung
- Benutzeroberfläche
- Options Menü
- Roboter Programme
- Roboter CNC
- RoboDK CAM
- Tipps und Tricks
- Allgemeine Hinweise und Tipps
- Add-ins
- Add-ins
- Datei-Manager
- Palletizing
- Computer Vision
- Display Panel
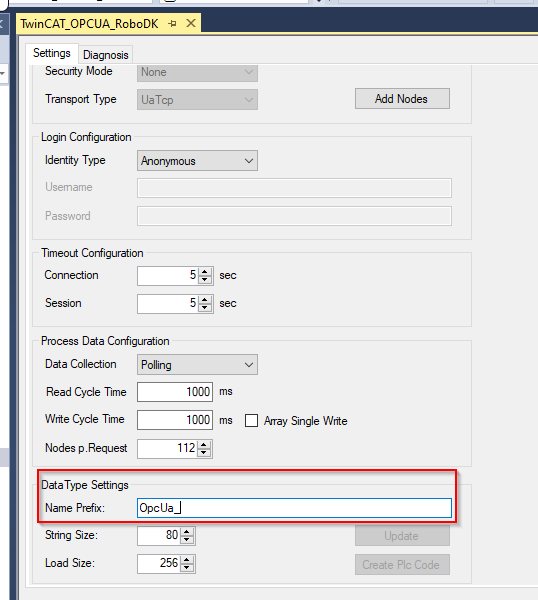
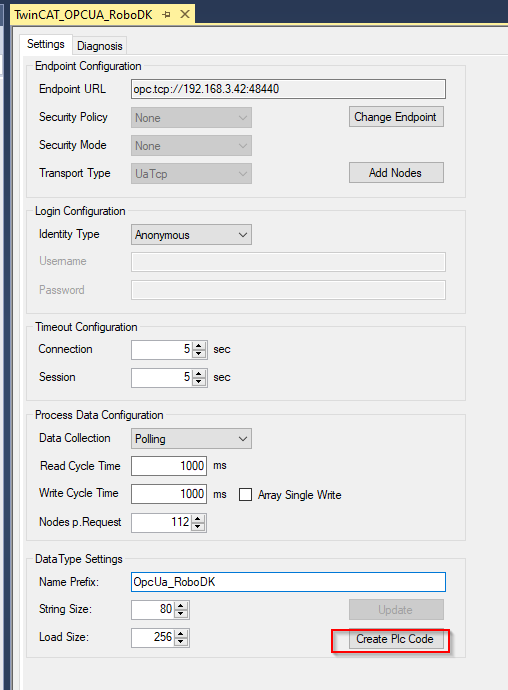
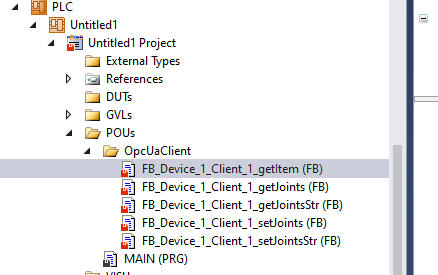
- OPC-UA
- Realistische Roboter-Simulation (RRS)
- Komponenten Add-in
- Augmented Reality
- Welding Add-in
- RoboDK CNC
- IO Monitor Plugin
- Blender Export Add-in
- IsaacSim Bridge Add-in
- Game Controller
- Plugins for CAD/CAM
- RoboDK Add-Ins für CAD/CAM-Software
- RoboDK Plugin for BobCAD-CAM
- RoboDK Plugin for FeatureCAM
- RoboDK Plugin for FreeCAD
- RoboDK-Add-In für Fusion 360
- RoboDK Plugin for hyperMILL
- RoboDK-Add-In für Inventor
- RoboDK Plugin for Mastercam
- RoboDK Plugin for MecSoft
- RoboDK Add-in für Onshape
- RoboDK-Add-In für Rhino
- RoboDK Add-in für Siemens Solid Edge
- RoboDK-Add-In für SolidWorks
- Kollisionserkennung
- Examples
- Robot Tips
- Post Prozessoren
- Virtuelle Realität
- RoboDK API
- Robotertreiber
- Accuracy