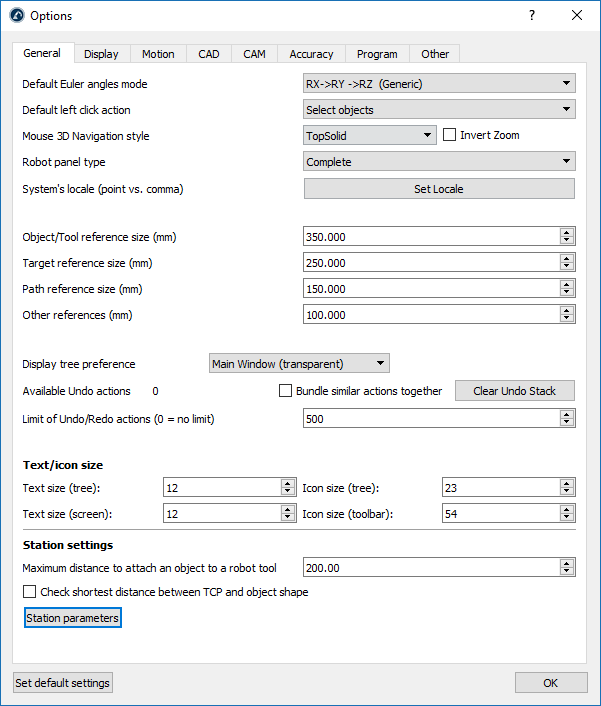
Registerkarte Allgemeines
Der Standard Euler Winkel Modus ermöglicht die Auswahl der Reihenfolge, in der Bezugssystem Rotationen standardmäßig ausgeführt werden. Ein generischer Referenzrahmen enthält Positions- und Orientierungsinformationen. Referenzrahmen sind Posen. Diese können mit der XYZ-Position und den Drehungen um X, Y und Z dargestellt werden. Die Reihenfolge der Rotation ist sehr wichtig. RoboDK wählt das richtige Format / die richtige Reihenfolge abhängig vom verwendeten Roboter vor. Weitere Informationen finden Sie im Abschnitt Bezugssysteme.
Die Standard-Linksklick-Aktion ist so eingestellt, dass standardmäßig Objekte ausgewählt werden. Dieses Verhalten kann auch in andere 3D-Navigationseinstellungen geändert werden, z. B. um standardmäßig zu drehen.
Mit dem Maus-3D-Navigationsstil ist es möglich, die bevorzugte Art der 3D-Navigation mit einer Maus festzulegen und spezifische Software wie Rhinoceros, Catia, TopSolid oder Vero zu emulieren.
Der Robot Panel-Typ ist standardmäßig auf Vollständig festgelegt. Dies zeigt ein komplettes Roboter-Panel an. Setzen Sie diese Option auf Normal oder Basic, um die Anzahl der im Robot Panel verfügbaren Optionen zu reduzieren.
Es ist möglich die Systemsprache und Ländereinstellungen zu übernehmen. Dadurch werden die Zahlen im richtigen Format angezeigt und das entsprechende Dezimalzeichen verwendet.
Objekt/Ziel/Pfad/Andere Referenzgröße definiert die Größe der Bezugssysteme auf dem Bildschirm für bestimmte Objekte. Es wird empfohlen, die Tasten + und - zu verwenden, um die Größen proportional zu vergrößern oder zu verkleinern
Die Strukturbaum Einstellung zeigt standardmäßig den Stationsbaum im Hauptfenster an. Ändern Sie dies zu Seitenfenster, um den Baum als separates Fenster anzuzeigen.
Es ist möglich, die Rückgängig Befehle zu löschen, um den RAM-Speicher zu leeren. Es ist auch möglich, die Rückgängig / Wiederherstellen-Aktionen zu beschränken, die im Speicher verbleiben. Wenn RoboDK langsamer wird, könnte dies daran liegen, dass viele Aktionen zum Rückgängigmachen gespeichert werden. Standardmäßig werden ähnliche Aktionen nicht gruppiert. Wenn beispielsweise ein Bezugssystem verschoben wird, werden alle kleinen Schritte aufgezeichnet. Wählen Sie ähnliche Aktionen gruppieren, um dieses Verhalten zu vermeiden.
Im Bereich Text/Symbolgröße können Sie die Größe des Textes und der Symbole in der Baumstruktur und in der Symbolleiste ändern.
Die maximale Entfernung zum Anheften eines Objekts an ein Roboterwerkzeug wird von einem Simulationsereignisverwendet. Simulationsereignisse können Objekte an Werkzeuge anheften und bestimmte Ereignisse simulieren. Diese Ereignisse haben keinen Einfluss auf den generierten Code, sie werden nur für Simulationszwecke (visuelle Ausgabe) verwendet.
Die Stationsparameter sind Statusparameter, die mit der RDK-Datei gespeichert und manuell oder über die API geändert werden können. Die Stationsparameter ermöglichen die Simulation von digitalen Eingängen und digitalen Ausgängen und die Kommunikation mit anderen Systemen über die API, z. B. eine SPS