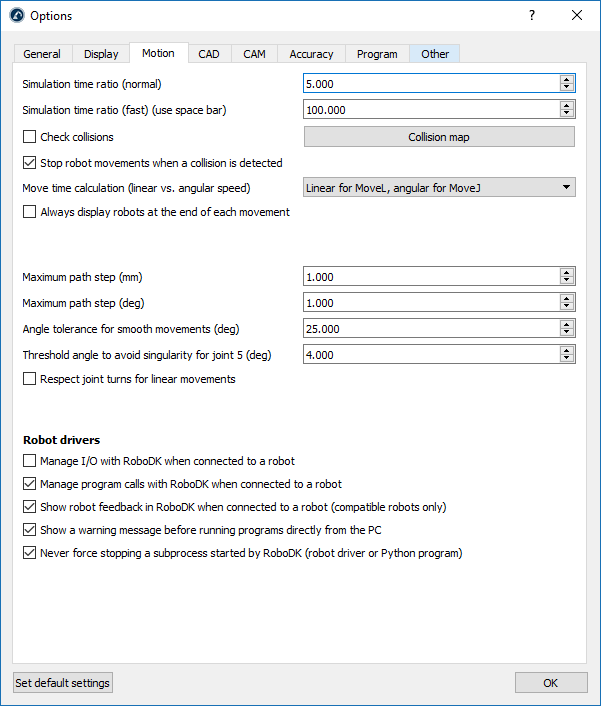
Registerkarte Bewegung
Das Simulationszeitverhältnis bestimmt, wie schnell eine Simulation im Verhältnis zur Realität abläuft. Das Standardverhältnis von 5 bedeutet, dass 1 Sekunde in der Simulation, 5 Sekunden in der Realität entsprechen. Weitere Informationen sind im Abschnitt Simulationszeitverhältnisverfügbar.



Die Bewegungszeitberechnung definiert, wie RoboDK die Zykluszeit berechnet und wie die Roboter die Linear-/Winkelgeschwindigkeiten/Beschleunigungen für Simulation und Timing verwenden. Weitere Informationen finden Sie im Abschnitt Zykluszeit.
Wenn das Simulationsverhältnis zu schnell ist, kann der Computer den Roboter möglicherweise nicht am Ende jedes Pfades anzeigen, um eine schnelle Simulation zu erhalten. Um diesen Effekt zu vermeiden, aktivieren Sie die Option Roboter immer am Ende jeder Bewegung anzeigen.
Die maximale Pfadschrittweite (mm/deg) definiert, wie RoboDK lineare Bewegungen bzw. Gelenkbewegungen für Simulationszwecke diskretisiert.
Der Schwellwertwinkel zur Vermeidung von Singularitäten für Gelenk 5 (Grad) wird für 6-Achse Roboter verwendet, um die Singularität des Handgelenks zu vermeiden. Wenn eine Singularität erkannt wird, muss das Roboterprogramm geändert werden. Dadurch wird sichergestellt, dass das Programm ordnungsgemäß auf dem realen Controller ausgeführt wird.
Der Abschnitt Robotertreiber ermöglicht das Festlegen des Verhaltens von Robotertreibern. Robotertreiber ermöglichen eine dauerhafte Verbindung zwischen dem realen Roboter und RoboDK.
Das Verwalten von I/O mit RoboDK, wenn eine Verbindung zu einem Roboter besteht, simuliert Eingaben und Ausgaben als RoboDK-Stationsparameter, anstatt den Status von Ein- / Ausgängen am Roboter zu ändern.
Die Option Roboter-Feedback in RoboDK anzeigen, wenn ein Roboter verbunden ist, zeigt die Roboterbewegung in Echtzeit an, während sich der Roboter bewegt.
Eine Warnmeldung anzeigen, bevor Programme direkt vom PC ausgeführt werden, hat zur Folge, dass ein Popup-Fenster angezeigt wird, bevor das Programm vom PC aus ausgeführt wird (bei Verwendung der Option Start on Robot).
Deaktivieren Sie nie einen von RoboDK gestarteten Prozess erzwingt stoppen, wenn Probleme mit Robotertreibern auftreten. Dadurch wird sichergestellt, dass keine anderen Prozesse im Hintergrund ausgeführt werden, wenn eine neue Verbindung eingerichtet wird.