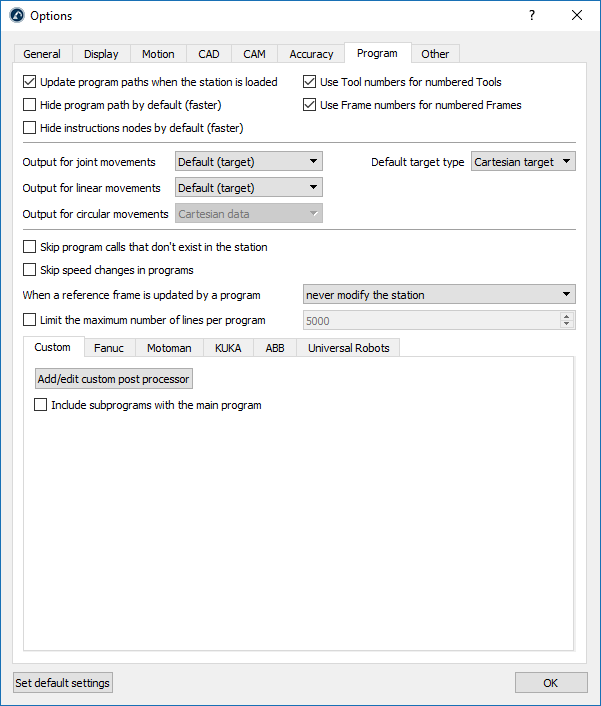
Registerkarte Programm
Die Registerkarte Programm zeigt die Einstellungen für Programme an.
Wählen Sie die Programmpfade beim Laden der Station aktualisieren, um alle Programmprobleme zu aktualisieren und die Programme mit Problemen mit einem Warnzeichen anzuzeigen: 
Wenn Sie Programmpfad standardmäßig ausblenden auswählen, werden die Programmpfade nicht angezeigt, wenn neue Programme generiert werden. Klicken Sie mit der rechten Maustaste auf ein Programm und aktivieren bzw. deaktivieren Sie das Anzeigen des Pfads, um den gelben Pfad des Roboter TCP anzuzeigen / auszublenden.
Verwenden Sie Werkzeug/Bezugssystem Nummern um die korrespondierenden Registernummern für nummerierte Werkzeuge/Bezugssysteme zu verwenden, anstatt die Werkzeug- und Bezugsrahmenpositionen in der Robotersteuerung zu aktualisieren. Dies ist für Robotersteuerungen verfügbar, die meistens nummerierte Register anstelle von Variablen verwenden. Dieses Verhalten kann auch mit Postprozessoren angepasst werden.
Es ist möglich, eine bestimmte Zielausgabe für Point to Point/lineare Bewegungen bei der Programmgenerierung zu erzwingen, indem achsspezifische oder kartesische Daten angegeben werden. Standardmäßig verwendet RoboDK die Zieleinstellungen (achsspezifische Koordinaten für achsspezifische Ziele und kartesische Koordinaten für kartesische Ziele).
Standardmäßig erstellt RoboDK neue Ziele als kartesische Ziele, d.h. wenn ein Bezugssystem verschoben wird, wird die Position des Roboters zum Ziel verändert. Es ist möglich, achsspezifische Ziele auszuwählen, um absolute Ziele festzulegen, die sich nicht in Abhängigkeit von den Bezugssystemen/Frames ändern.
Wählen Sie Überspringen von Programmaufrufen, die in der Station nicht vorhanden sind, um das Generieren von Programmen zu unterdrücken.
Wenn ein Bezugssystem in einem Programm verwendet wird (mit der Anweisung Bezugssystem erstellen) und dieses anschließend verschoben wird, wird die Roboterbewegung abgeändert. Standardmäßig platziert die Anweisung Bezugssystem erstellen die Roboter Referenz an der ursprünglichen Position, ohne die Referenz/das Bezugssystem der Station zu ändern.
Begrenzen Sie die maximale Anzahl von Zeilen pro Programm, um einzustellen, wie viele Zeilen ein Programm maximal haben wird. Dies teilt ein langes Programm in Unterprogramme auf und erzeugt ein Hauptprogramm, das diese kleineren Programme sequentiell ausführt. Robotersteuerungen haben eine begrenzte Kapazität und können Programme einer bestimmten Größe ausführen. Mit Ausnahme von spezifischen / älteren Robotersteuerungen können die meisten Controller 5000 Zeilen in einem Programm verarbeiten.
Einerseits sind spezifische Einstellungen für bestimmte Robotermarken verfügbar, wenn integrierte Postprozessoren verwendet werden. Auf der anderen Seite erlauben benutzerdefinierte Postprozessoren das Anpassen oder Auferlegen eines bestimmten Verhaltens kurz bevor das Programm erzeugt wird.