Palletizing
Mit dem Palettierungs-Plugin können Sie eine automatische Palettierung durchführen. Das Palettierungs-Plugin hilft Ihnen, über eine visuelle und intuitive Schnittstelle schnell ein Palettierungsprogramm zu erstellen.
Dieses Beispiel wird Sie durch die Schritte führen, die erforderlich sind, um von einer einfachen Palettierstation zu einer Simulation und schließlich zu einem echten Roboterprogramm zu gelangen, das Sie in eine Robotersteuerung laden und ausführen können.
Sie sollten das Palettierungs-Plugin in RoboDK laden, um die Palettierungsfunktionen zu aktivieren.
Folgen Sie diesen Schritten, um das Palettierungs-Plugin zu aktivieren:
1.Wählen Sie Tools➔ Plug-Ins.
2.Doppelklicken Sie auf das PluginPalletizing, wenn es nicht aktiviert ist.
Sie sollten den Eintrag Palettierung im Menü und ein neues Palettierungssymbol in der Symbolleiste sehen.
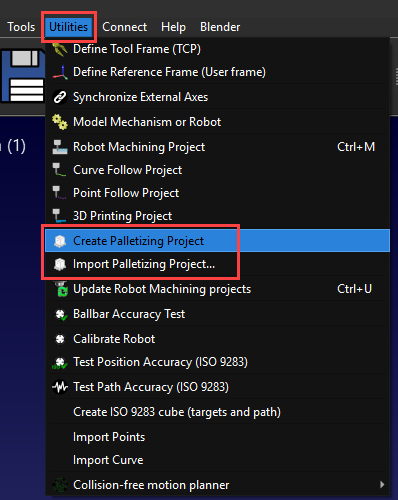
Um ein Palettierprojekt zu erstellen, müssen Sie zunächst Ihre Station in RoboDK richtig einrichten.
Folgen Sie diesen Schritten: um Ihren Sender richtig einzurichten:
1. Sie sollten einen Roboter, ein Werkzeug (TCP), einen Referenzrahmen zum Aufnehmen des Kartons (Pick_Frame) und einen Referenzrahmen zum Aufbau Ihrer Palette (Pallet) laden.
2.Wir empfehlen Ihnen außerdem, den Karton, den Sie stapeln möchten, und die Palette, auf der Sie stapeln möchten, zu importieren. Alternativ dazu finden Sie in der RoboDK-Bibliothek Kisten in Standardgröße.
3.Die Palette muss an den Achsen X+ und Y+ des Stapelrahmens (Palette) ausgerichtet sein.
Hinweis: Dieses Beispiel enthält der Einfachheit halber keinen Förderer und/oder eine externe Achse für den Roboter, aber beides wird von der Funktion unterstützt.
Der Palettierassistent verlangt von Ihnen ein Unterprogramm zur Auswahl eines neuen Kartons und ein Programm zum Absetzen des Kartons. Wir empfehlen Ihnen, diese zuerst zu erstellen.
Folgen Sie diesen Schritten, um ein Pick-Programm (Pick_Box) und ein Drop-Programm (Drop_Box) zu erstellen:
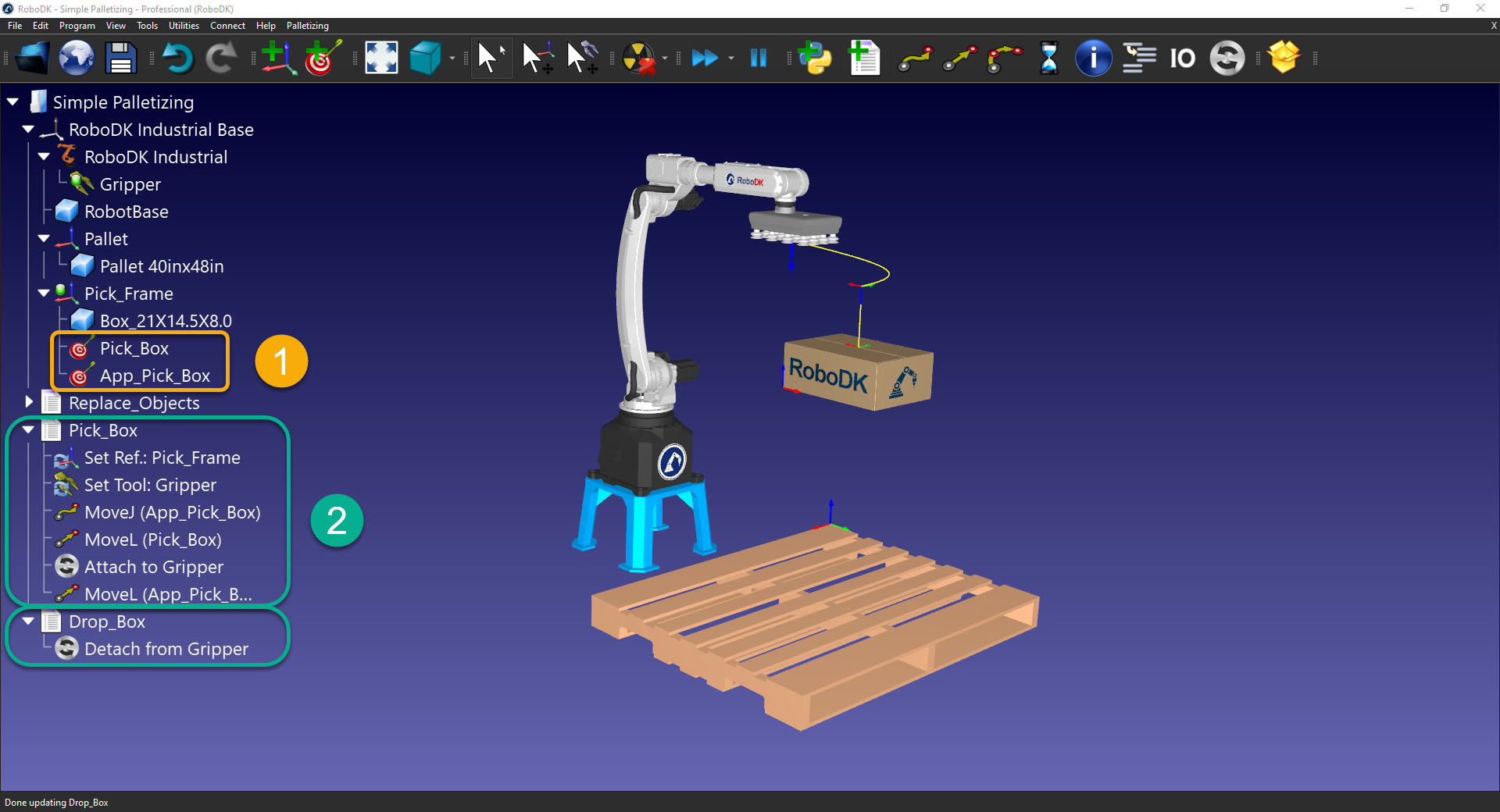
1. Erstellen Sie ein Pick-Ziel, an dem Sie die neue eingehende Box aufnehmen werden. Wir empfehlen Ihnen außerdem, einen Anflugpunkt hinzuzufügen.
2. Erstellen Sie ein Pick_Box und Drop_Box Programm.
Hinweis: Weitere Informationen zur Erstellung von Basisprogrammen wie Pick_Box und Drop_Box finden Sie im Abschnitt Roboterprogramme.