Vorbereiten Ihrer Station
Um ein Palettierprojekt zu erstellen, müssen Sie zunächst Ihre Station in RoboDK richtig einrichten.
Folgen Sie diesen Schritten, um Ihren Sender richtig einzurichten:
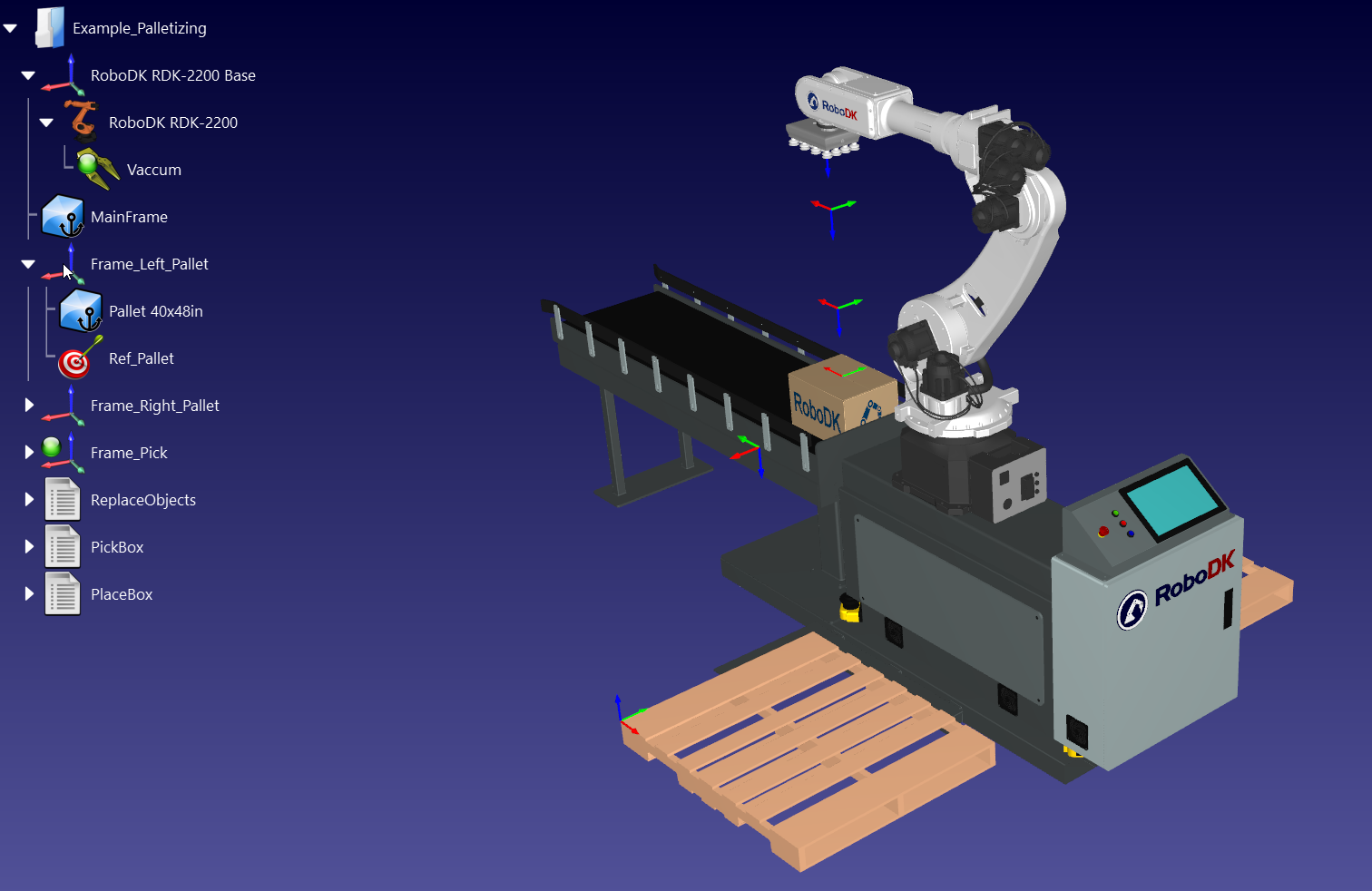
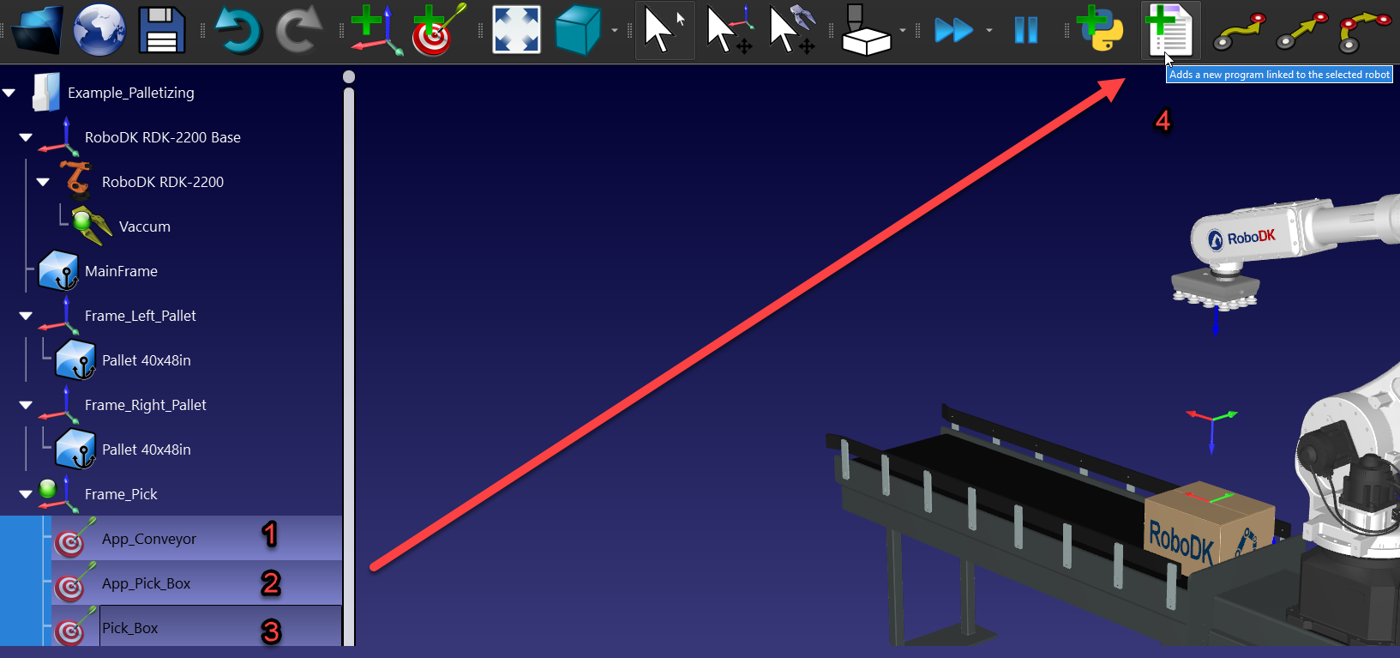
1.Sie sollten einen Roboter, ein Werkzeug, eine Kiste, einen Referenzrahmen, in dem Sie Ihren Zielen beibringen, die Kiste zu nehmen (z.B.: Frame_Pick), eine Palette und einen Referenzrahmen an der Ecke Ihrer Palette (z.B.: Frame_Pallet) laden. Sie können auch ein Förderband laden, wenn Sie eines haben.
Hinweis: Bei dem in diesem Tutorial verwendeten Beispiel handelt es sich um eine Station mit 2 Paletten. Wir haben also 2 Referenzrahmen, einen für jede Palette, "Rahmen_linke_Palette" und "Rahmen_rechte_Palette".
Hinweis: Sie können Kartons und Paletten in Standardgrößen direkt aus unserer Bibliothek herunterladen. Sie können auch das Box Spawner Add-in verwenden, um Kartons in individuellen Größen zu erstellen.
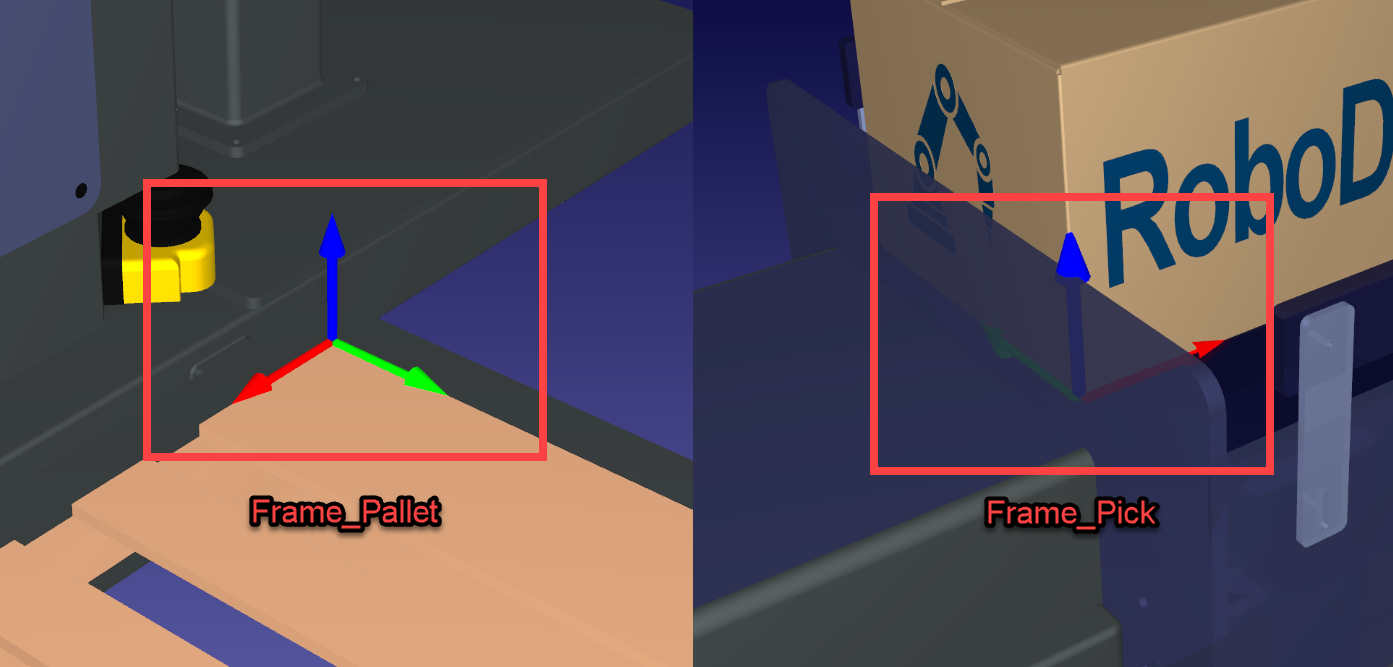
2.Die Palettenreferenzrahmen müssen so ausgerichtet sein, dass ihre X+ Achse in Richtung der Palettenlänge zeigt.
3.Die Palettenreferenzrahmen müssen so ausgerichtet sein, dass ihre Z+-Achse senkrecht zur Palette steht (nach oben zeigt).
4.Vergewissern Sie sich, dass Sie die Palette und die Kiste mit ihren jeweiligen Referenzrahmen verknüpfen. Damit stellen Sie sicher, dass die Roboterziele ihre Position automatisch und in Echtzeit aktualisieren, wenn Sie sie bewegen müssen.
5.Positionieren Sie die verschiedenen Objekte/Rahmen nach Bedarf neu.
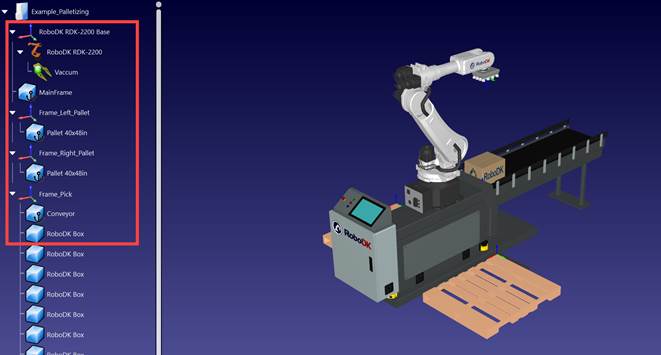
6.Klonen Sie die Box mehrfach, indem Sie sie kopieren und in den "Frame_Pick" einfügen, damit Sie mehrere Picks machen können.
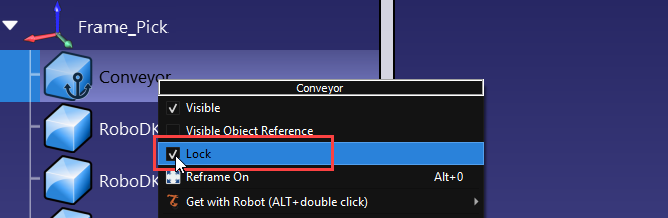
7.Vergewissern Sie sich, dass Ihre 3D-Objekte, aber nicht die Rahmen, in ihrem Rahmen fixiert sind, indem Sie mit der rechten Maustaste klicken und dann "Fixieren" wählen.
Hinweis: Dieses Beispiel enthält der Einfachheit halber keinen beweglichen Förderer und/oder eine externe Achse für den Roboter, aber beides wird unterstützt.
Erstellen Sie Pick and Drop
Der Palettierassistent verlangt von Ihnen ein Unterprogramm zur Auswahl eines neuen Kartons und ein Unterprogramm zum Platzieren des Kartons. Das Programm "PlaceBox" dient nur dazu, den Karton vom Greifer zu lösen und ihn auf Ihren Palettenrahmen zu übertragen; die eigentlichen Platzierungsziele werden später automatisch vom Palletizing Add-in erstellt.
Folgen Sie diesen Schritten, um ein Pick-Programm "PickBox" und ein Drop-Programm "PlaceBox" zu erstellen:
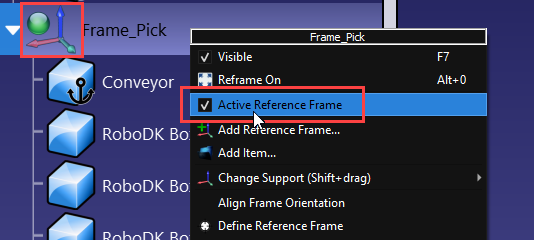
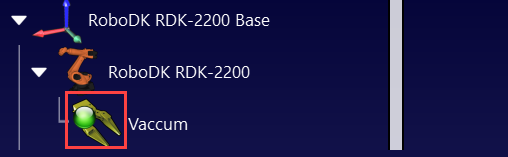
1.Vergewissern Sie sich zunächst, dass Sie die Funktion "Frame_Pick" aktivieren und dass Ihr Werkzeug aktiv ist, bevor Sie neue Ziele erstellen. Sie sollten einen grünen Kreis haben, wenn sie aktiv sind.
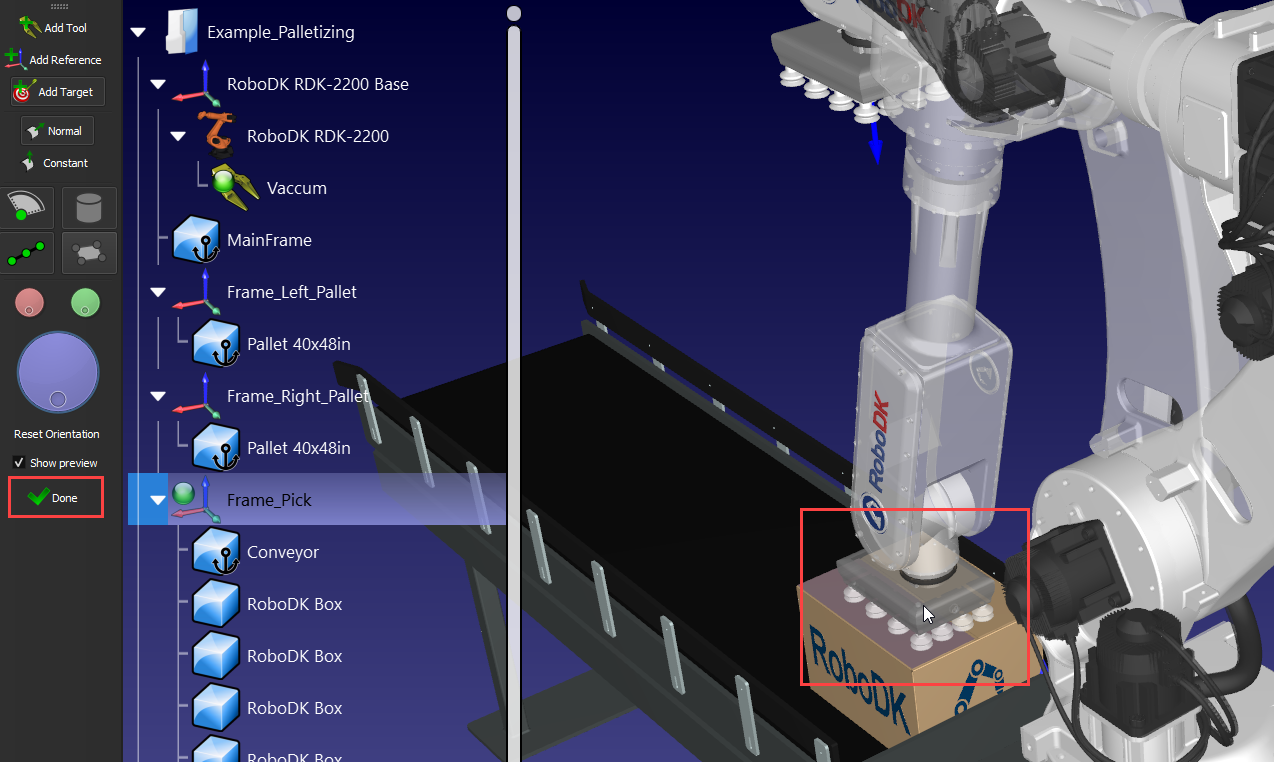
2.Wählen Sie auf der Registerkarte "Programm" die Option "Ziel(e) auf Oberfläche einlernen". Klicken Sie oben auf das Feld und dann auf "Fertig".
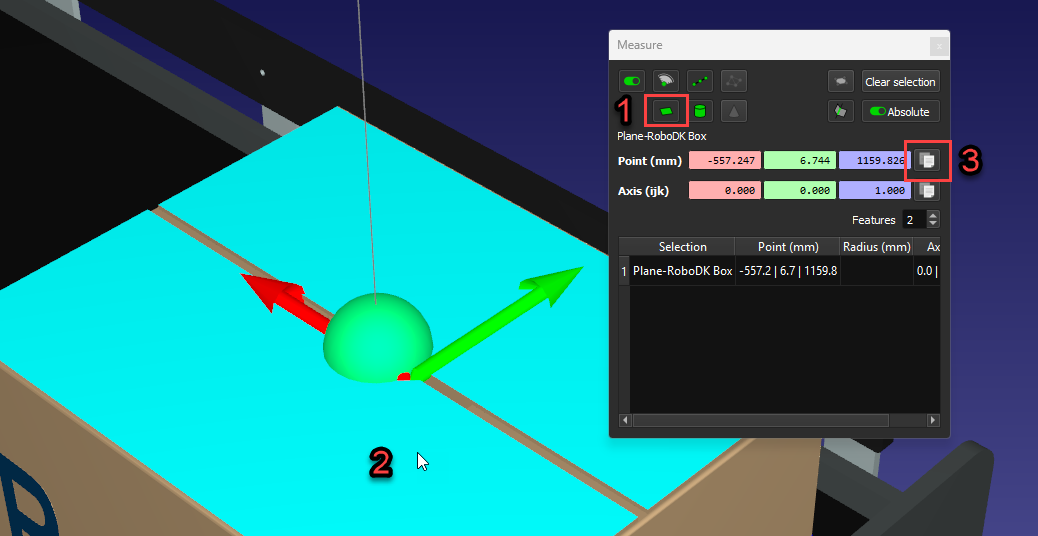
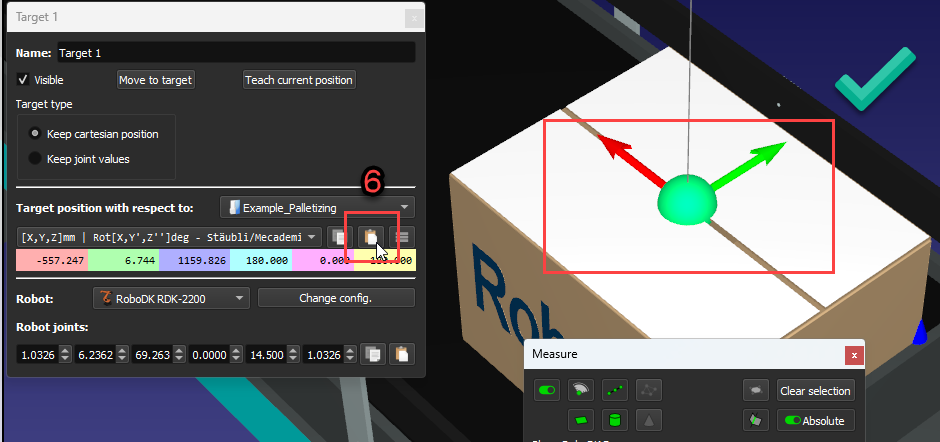
3.Sie sollten nun Ihr erstes Ziel am unteren Rand des "Rahmens_Auswahl" haben. Um sicherzugehen, dass es oben in der Box zentriert ist, halten Sie die Tastenkombination SHIFT+M gedrückt, um das Messwerkzeug zu öffnen, und klicken Sie dann oben auf die Box und kopieren Sie die Werte. Klicken Sie dann auf Ihr Ziel und drücken Sie F3, um die Zielparameter zu bearbeiten. Wählen Sie den Ursprung der Station als Referenz und fügen Sie die Werte ein. Das Ziel sollte sich nun in der Mitte des Kastens befinden.

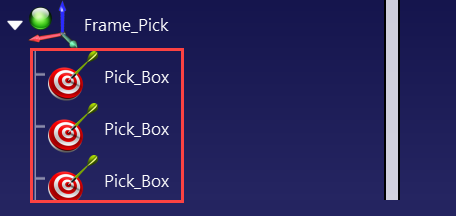
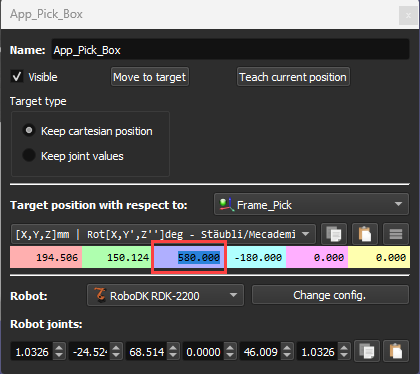
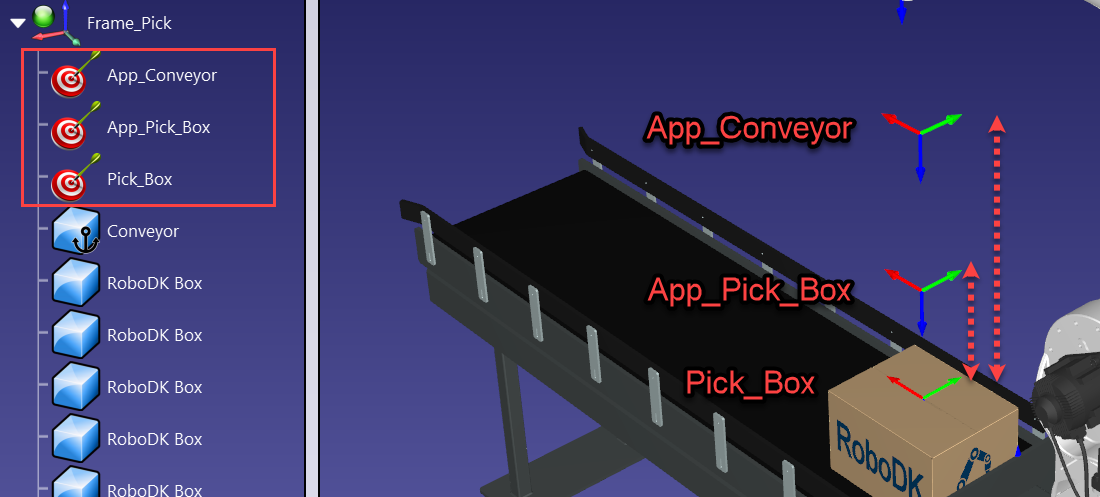
4.Benennen Sie Ihr Ziel in "Pick_Box" um und kopieren/fügen Sie es dann zweimal in den "Frame_Pick". Benennen Sie sie in "App_Pick_Box" und "App_Conveyor" um. Bearbeiten Sie dann die Zielparameter und fügen Sie mit Ihrem Scrollrad etwas Abstand zu den Z-Werten hinzu, bis Sie mit den Zielpositionen zufrieden sind.
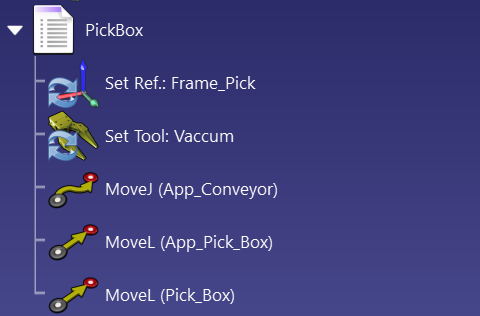
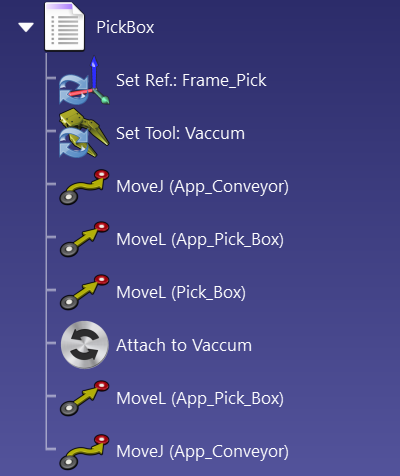
5.Klicken Sie bei gedrückter STRG-Taste auf alle 3 Ziele in der Reihenfolge, in der das Programm sie ausführen soll, und klicken Sie auf "Programm erstellen". Dies sollte automatisch Ihre Ziele, das Werkzeug und den Referenzrahmen zum Programm hinzufügen. Benennen Sie das Programm in "PickBox" um.
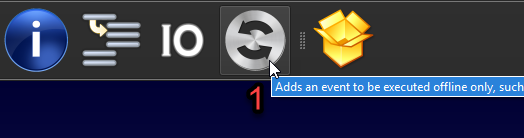
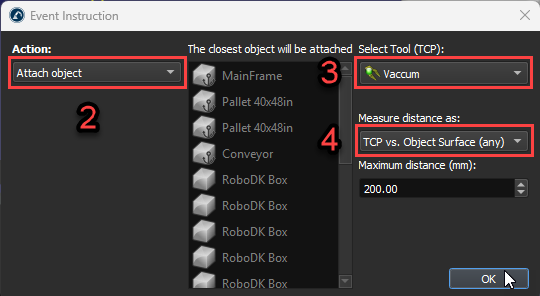
6.Fügen Sie ein "Ereignis" hinzu, wählen Sie "Objekt anhängen", vergewissern Sie sich, dass das richtige Werkzeug ausgewählt ist, und wählen Sie dann "TCP vs. Objektoberfläche (beliebig)" in den Optionen für die Abstandsmessung. Dadurch wird der Kasten an das Werkzeug angehängt. Kopieren Sie die Ziele "App_Pick_Box" und "App_Conveyor" und fügen Sie sie nach dem angehängten Ereignis ein. Sie sollten nun ein funktionierendes Kommissionierprogramm haben
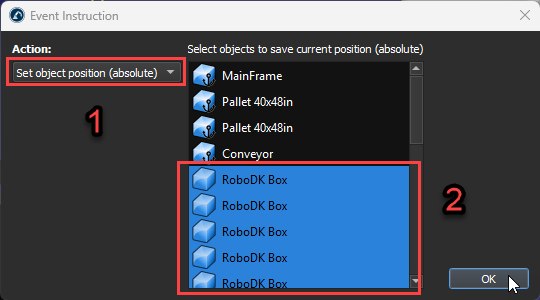
7.Erstellen Sie ein leeres Programm, fügen Sie ein Ereignis hinzu, wählen Sie "Objektposition setzen (absolut)" und markieren Sie alle Ihre Boxen. Dieses Programm verschiebt die Boxen wieder an ihre ursprüngliche Position, so dass Sie Ihre Station mit einem Klick zurücksetzen können. Benennen Sie das Programm in "ReplaceObjects" um.
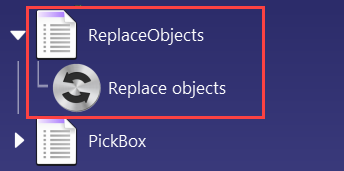
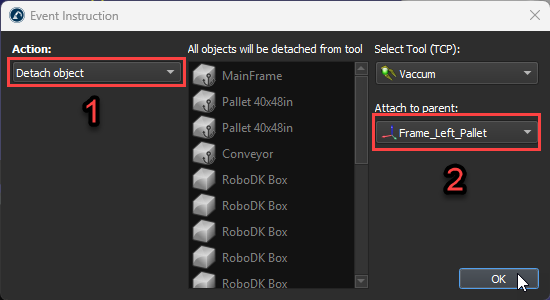
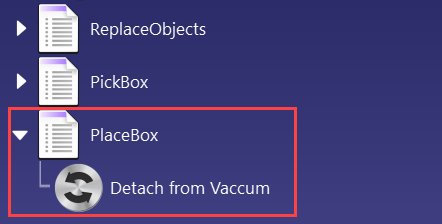
8.Erstellen Sie ein weiteres leeres Projekt, fügen Sie ein Ereignis hinzu, wählen Sie "Objekt ablösen" und wählen Sie den Referenzrahmen, an den die Box nach dem Platzieren angehängt werden soll; in unserem Fall ist es "Frame_Left_Pallet". Benennen Sie das Programm in "PlaceBox" um.
9.Als letzte Voraussetzung fehlt noch ein Ziel, das als Konfigurationsreferenz verwendet wird. Aktivieren Sie den Referenzrahmen Ihrer Palette, bewegen Sie Ihren Roboter darauf, stellen Sie sicher, dass die Konfiguration des Roboters sinnvoll ist, und erstellen Sie dann ein Ziel. Benennen Sie es in "Ref_Pallet" um.
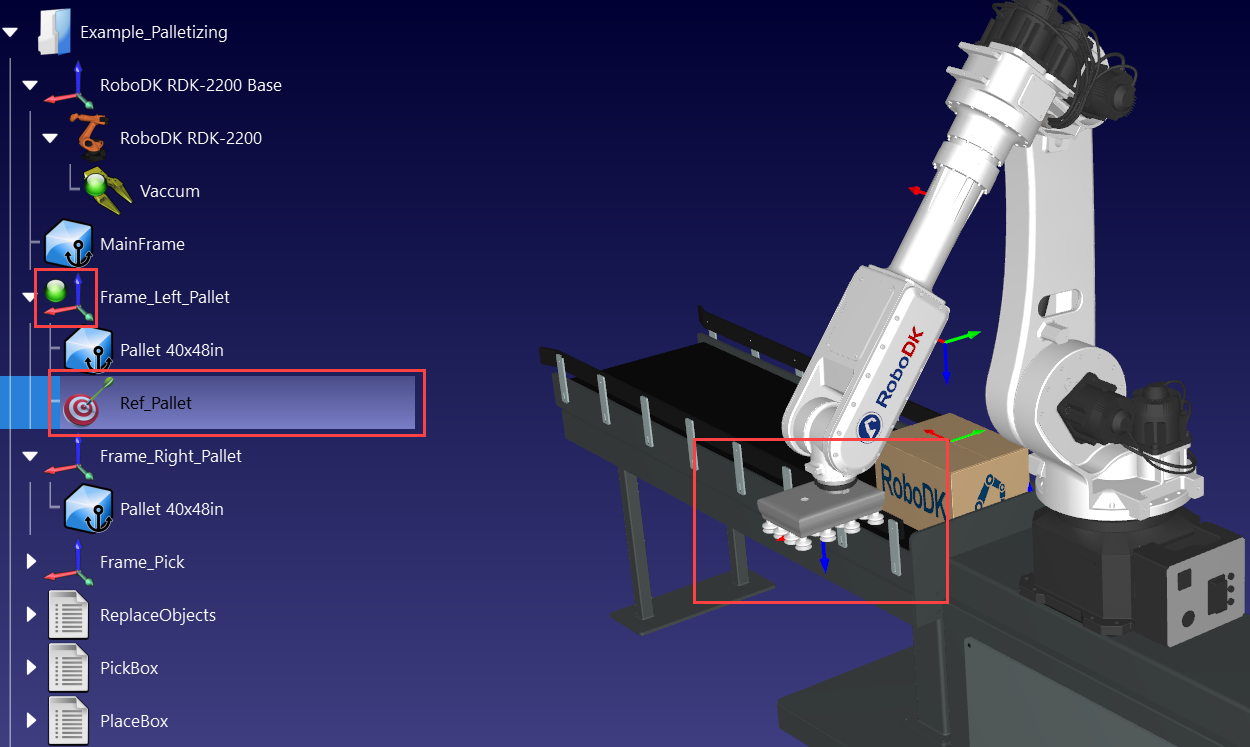
Sie haben nun alles vorbereitet, um Ihr Palettierprojekt zu erstellen. Ihre Station sollte wie folgt aussehen: