Beispiel
Dieses Beispiel zeigt, wie Sie ein 3D-Modell und eine ausgewählte Kurve (Kante) aus FreeCAD in RoboDK laden können.
1.Laden Sie das Modell in FreeCAD, indem Sie auf die Schaltfläche „Modell laden“ klicken.
2.Richten Sie Ihre Station in RoboDK mit einem Roboter und anderen erforderlichen Objekten in der Umgebung ein.
3.Wählen Sie aus dem FreeCAD-Modellbaum die Teile oder Körper Ihres Modells aus, die Sie in RoboDK laden möchten.
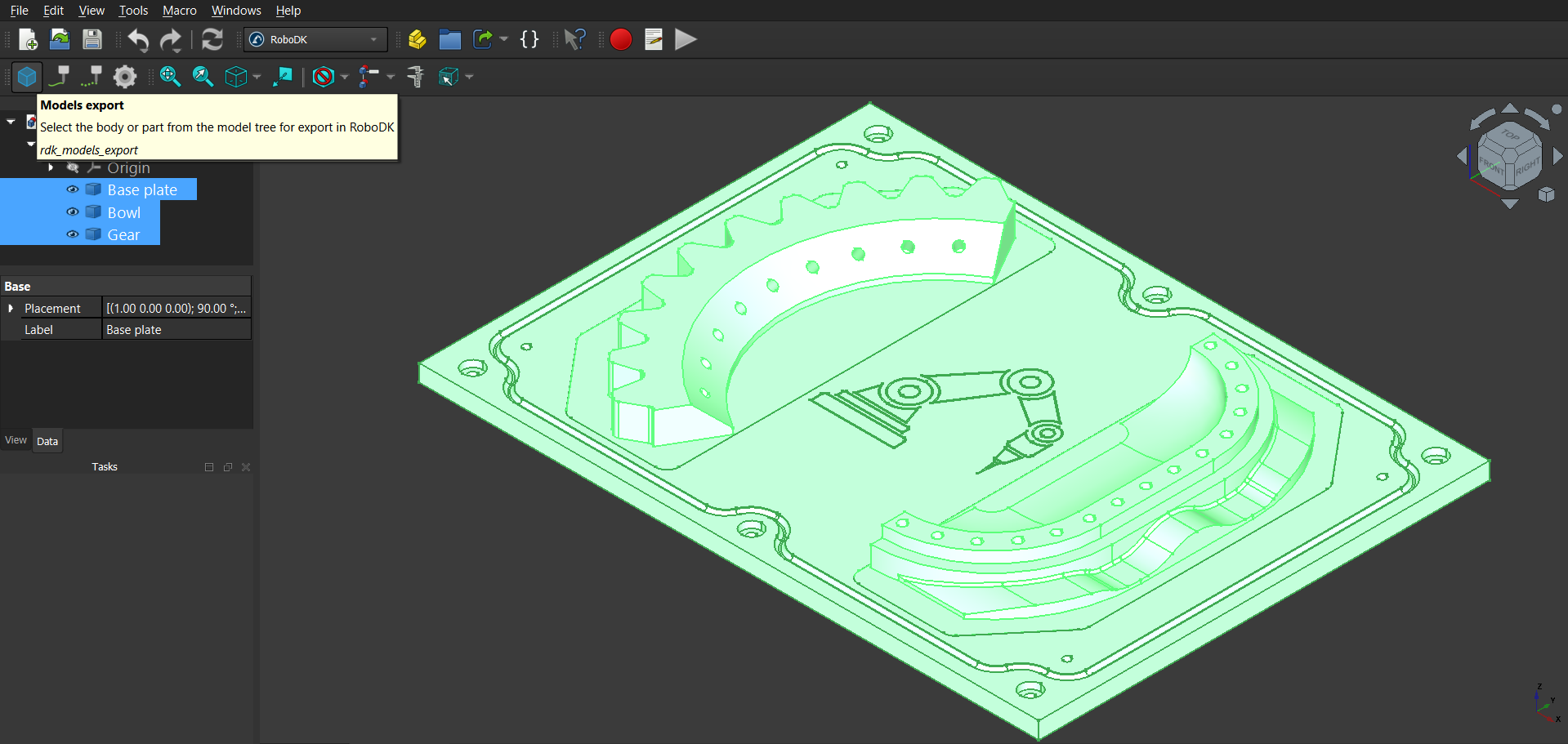
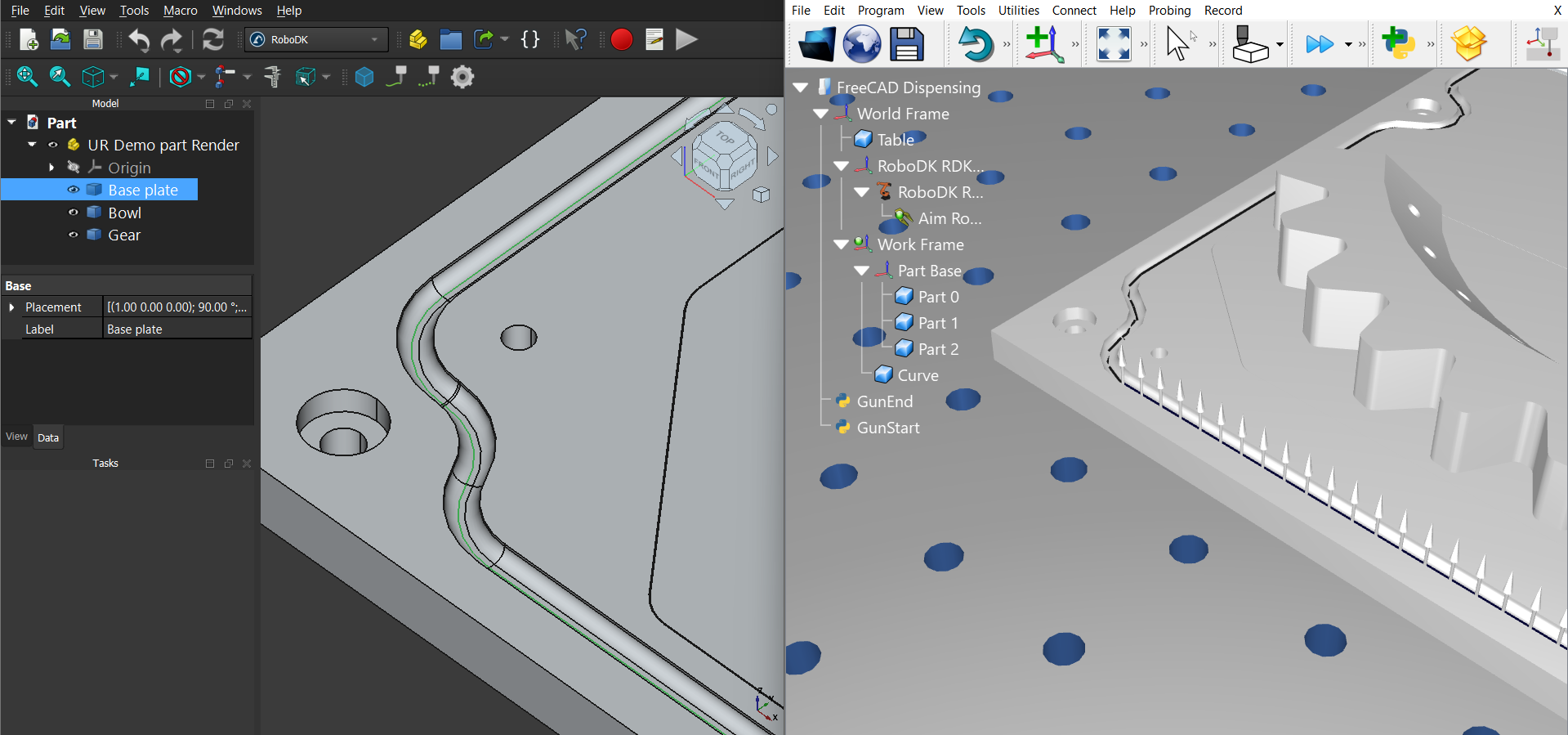
4.Wählen Sie in der Registerkarte „RoboDK-Add-in“ von FreeCAD die Option „Modell laden“, um die ausgewählten Modellteile in RoboDK zu laden.
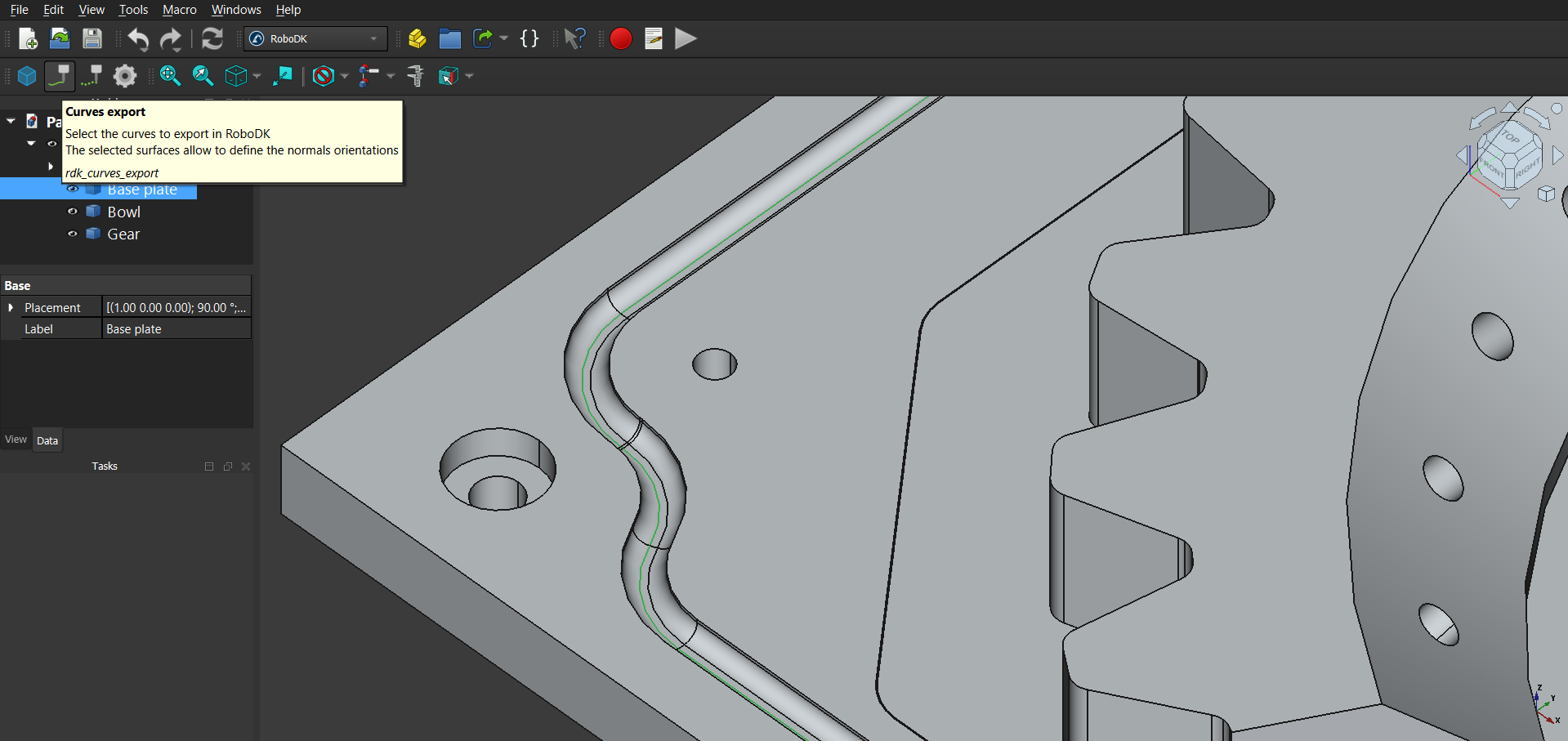
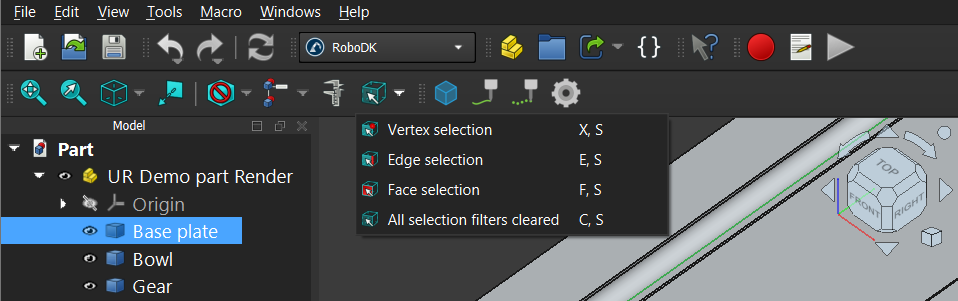
5.Wählen Sie die Kanten (Kurven) aus, die Sie in RoboDK sehen möchten, und klicken Sie in der Registerkarte „RoboDK-Add-in“ in FreeCAD auf „Kurven laden“.
6.Wenn Sie die Ausrichtung der Kurvennormalen festlegen möchten, wählen Sie die entsprechenden Flächen aus, um deren Winkel zu definieren, während Sie die Kurven auswählen.
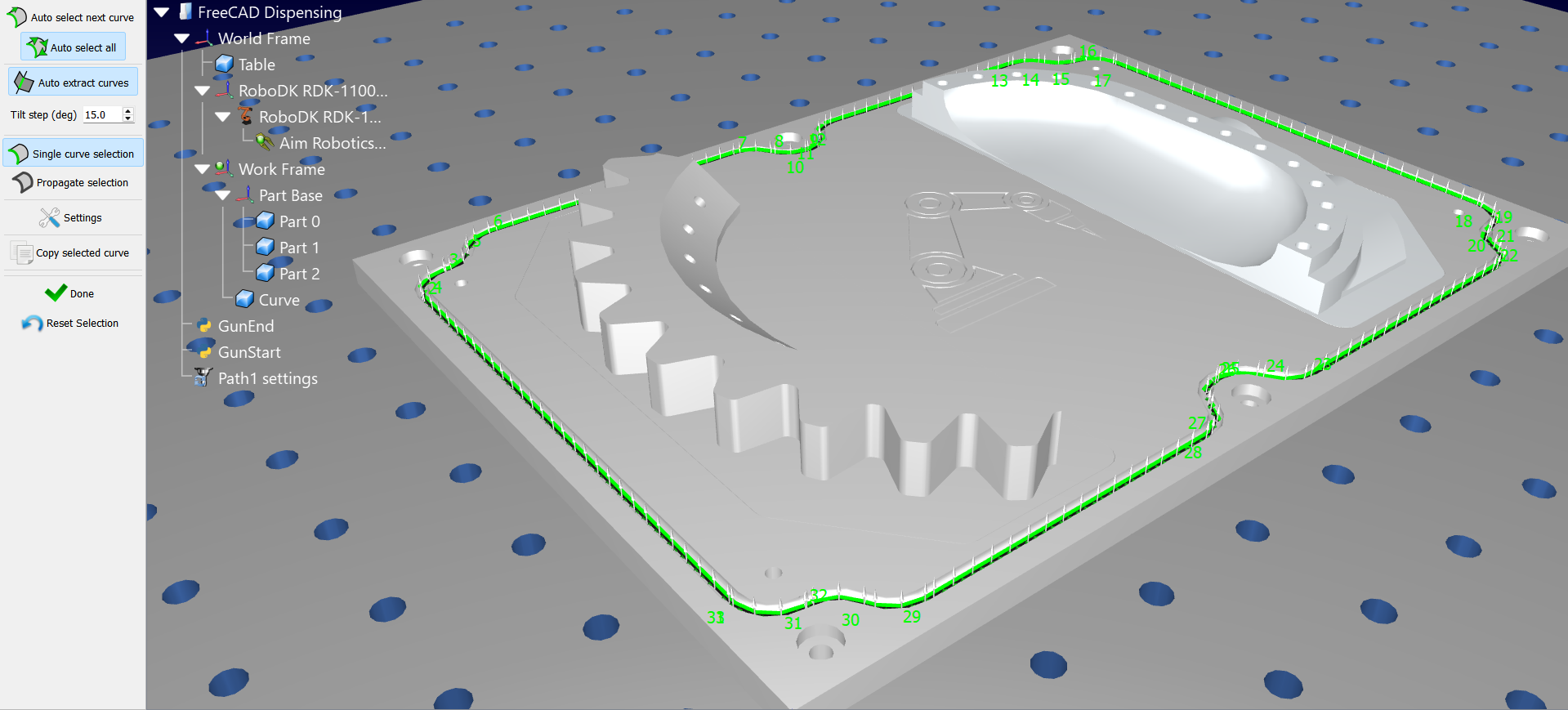
7.Überprüfen Sie das Exportergebnis in RoboDK.
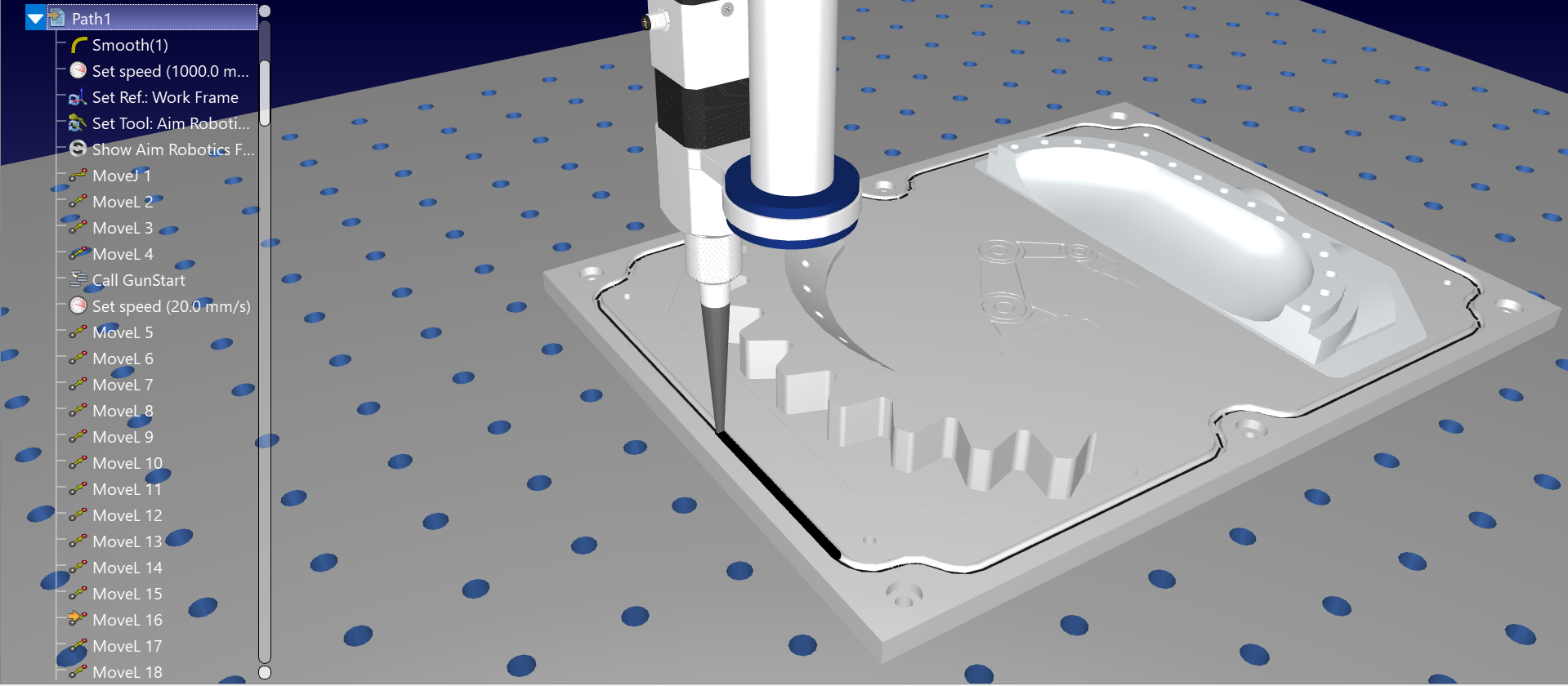
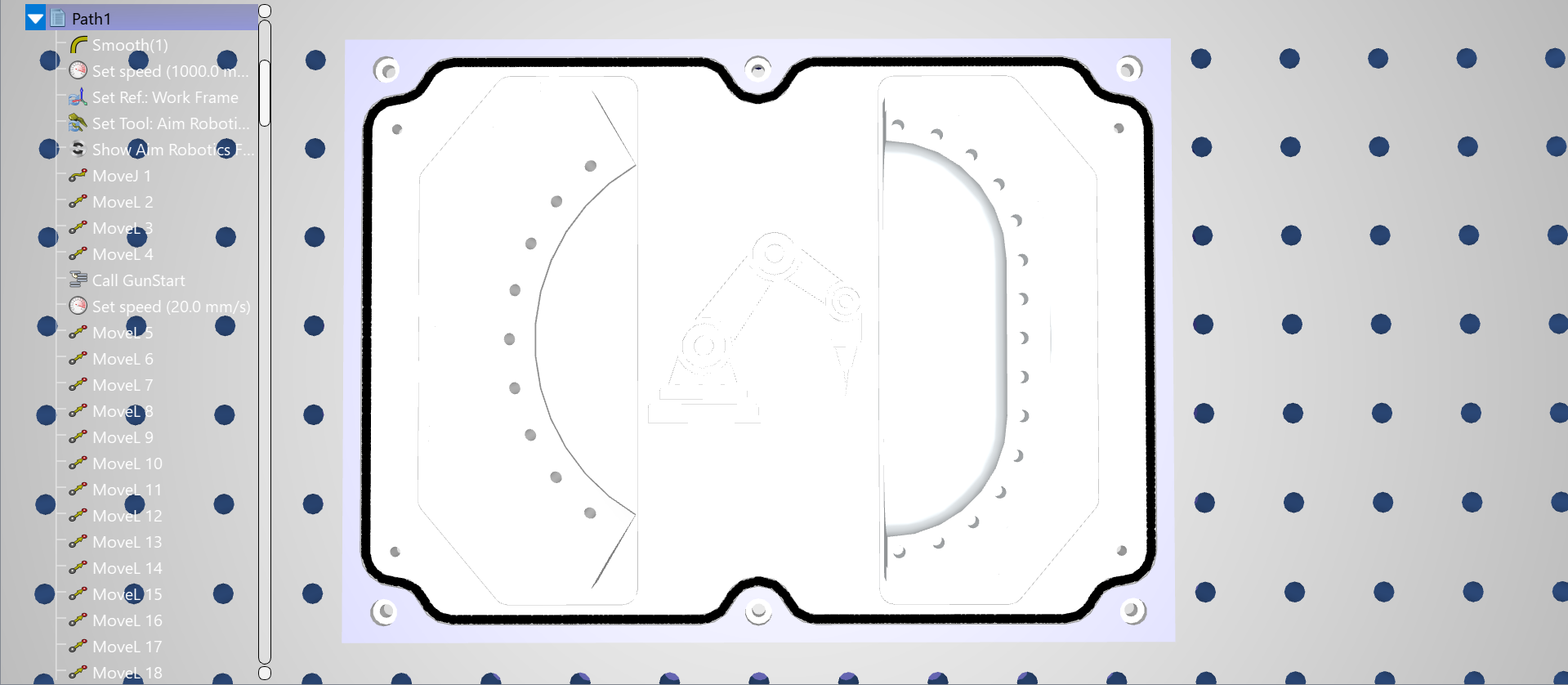
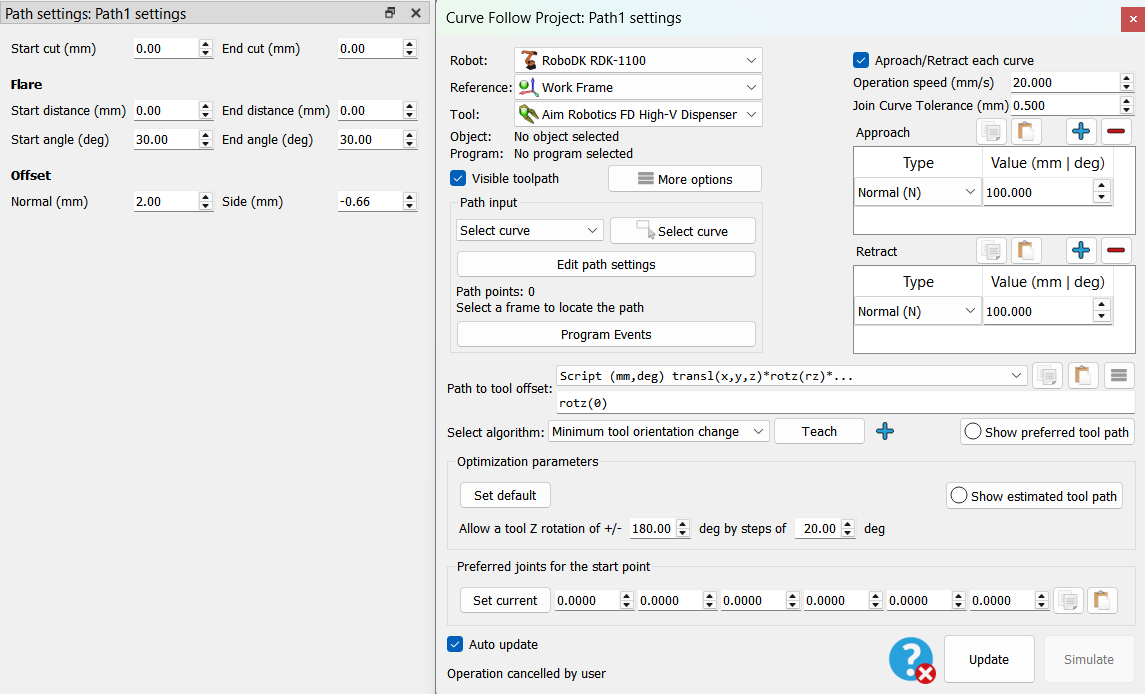
8.Erstellen Sie ein Kurvenfolgeprojekt (unter „Utilities“) mit den erforderlichen Änderungen an Parametern wie Versätzen und Betriebsgeschwindigkeit.
9.Nachdem das Programm für die Bahn für dieses Projekt erstellt wurde, klicken Sie mit der rechten Maustaste darauf, um „Anweisungen anzeigen“ zu aktivieren. Sie können nun das Programm bearbeiten, um Python-Skripte „GunStart“ und „GunEnd“ (mit „Program Call Instruction“) hinzuzufügen, um das Dosieren zu simulieren. Ändern Sie die erforderlichen Parameter wie Farbe und Radius des zu dosierenden Materials, indem Sie das Skript „GunStart“ bearbeiten.