RoboDK Plugin for FreeCAD
Einführung
Mit dem RoboDK-Add-in für FreeCAD können Sie 3D-Modelle, Kurven und Punkte direkt aus FreeCAD in RoboDK laden. Mit diesem Plug-in können Sie die FreeCAD-Software für die 3D-Modellierung und RoboDK für die Simulation und Offline-Programmierung von Industrieroboterarmen problemlos kombinieren.
Die FreeCAD-Software ist ein parametrischer 3D-Modellierer, der in erster Linie zum Entwerfen von Objekten entwickelt wurde. Die parametrische Modellierung ermöglicht es Ihnen, Ihr Design einfach zu ändern, indem Sie in den Modellverlauf zurückkehren und dessen Parameter ändern. FreeCAD ist eine kostenlose CAD-Software und Open Source.
Hinweis: Das RoboDK FreeCAD-Add-in ist mit FreeCAD Version 1.0.1 und höher kompatibel.
Add-in-Einrichtung
Wenn Sie RoboDK nach der Installation von FreeCAD installiert haben, sollte das RoboDK-Plug-in für FreeCAD bereits installiert sein.
Hinweis: Wenn Sie die RoboDK-Befehle in FreeCAD nicht sehen, sollten Sie die Anweisungen zur manuellen Installation des FreeCAD-Add-Ins befolgen.
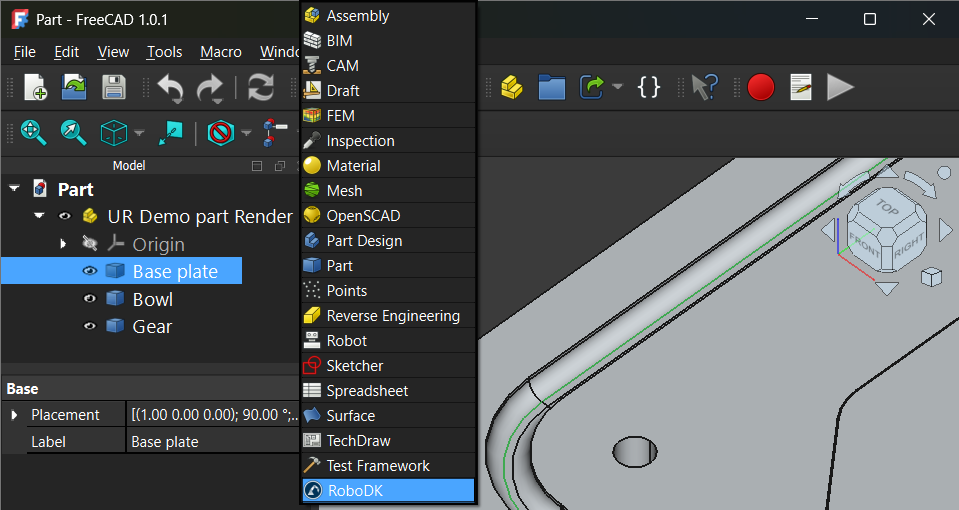
Die RoboDK-Befehle sind verfügbar, indem Sie RoboDK aus der Dropdown-Liste der Workbench auswählen:
Wenn Sie eine benutzerdefinierte RoboDK-Symbolleiste bevorzugen, können Sie diese separat erstellen, indem Sie die folgenden Schritte ausführen:
1.Starten Sie FreeCAD.
2.Richten Sie die benutzerdefinierte RoboDK-Symbolleiste ein und fügen Sie sie hinzu:
a.Wählen Sie „Werkzeuge“ → „➔ “ → „Customize…“ → „➔ “ → „Toolbars“.
b.Wählen Sie „Category“ (Kategorie) „➔ “ (Benutzerdefiniert) „RoboDK“.
c.Erstellen Sie eine neue benutzerdefinierte Symbolleiste in der Kategorie „Global“.
d.Fügen Sie die erforderlichen RoboDK-Befehle aus der Liste auf der linken Seite mit der Schaltfläche „➔ “ hinzu.
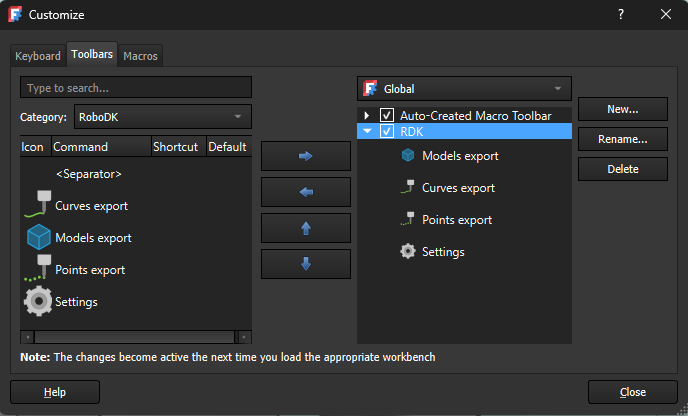
Anschließend zeigt FreeCAD eine benutzerdefinierte RoboDK-Symbolleiste an, wie in der folgenden Abbildung dargestellt.

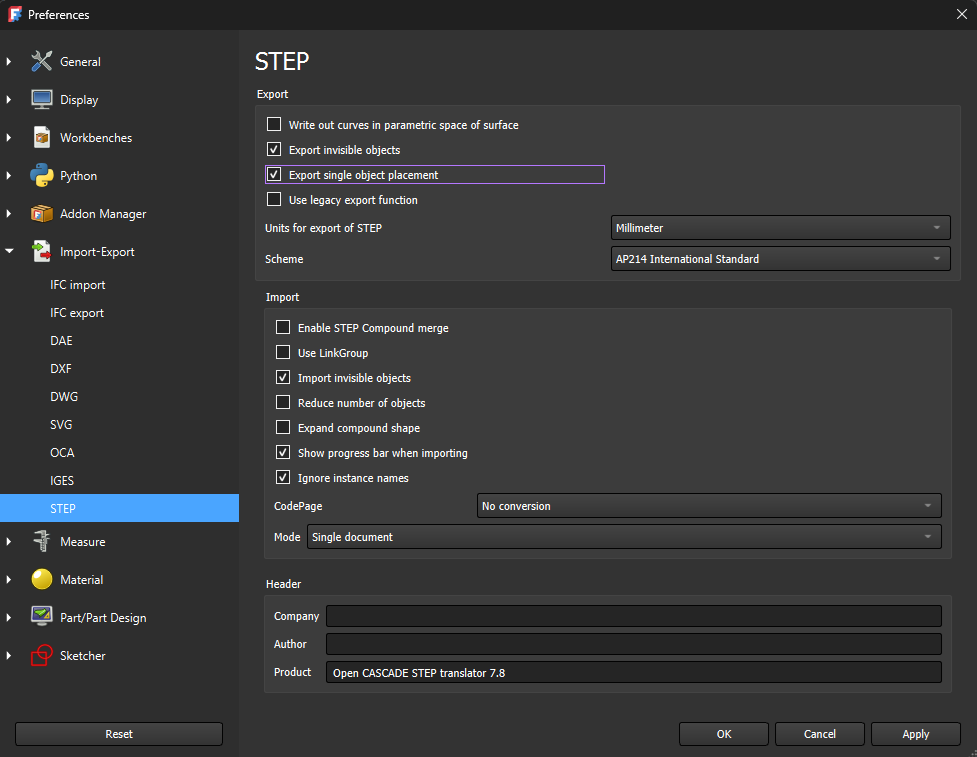
FreeCAD STEP-Exporteinstellungen
Um die Modelle mit dem richtigen Koordinatensystem zu exportieren, muss die folgende Option aktiviert werden:
Bearbeiten → Einstellungen… → Import-Export → STEP → Einzelnes Objekt exportieren
RoboDK-Symbolleiste für FreeCAD
Wenn Sie die FreeCAD-Software öffnen, sollte die Option „RoboDK“ in der Dropdown-Liste der Workbench aufgeführt sein. Wählen Sie die RoboDK-Symbolleiste aus, um die verfügbaren RoboDK-Befehle anzuzeigen.
Befolgen Sie die Anweisungen zur Einrichtung des FreeCAD-Add-ins, falls die RoboDK-Symbolleiste nicht angezeigt wird.
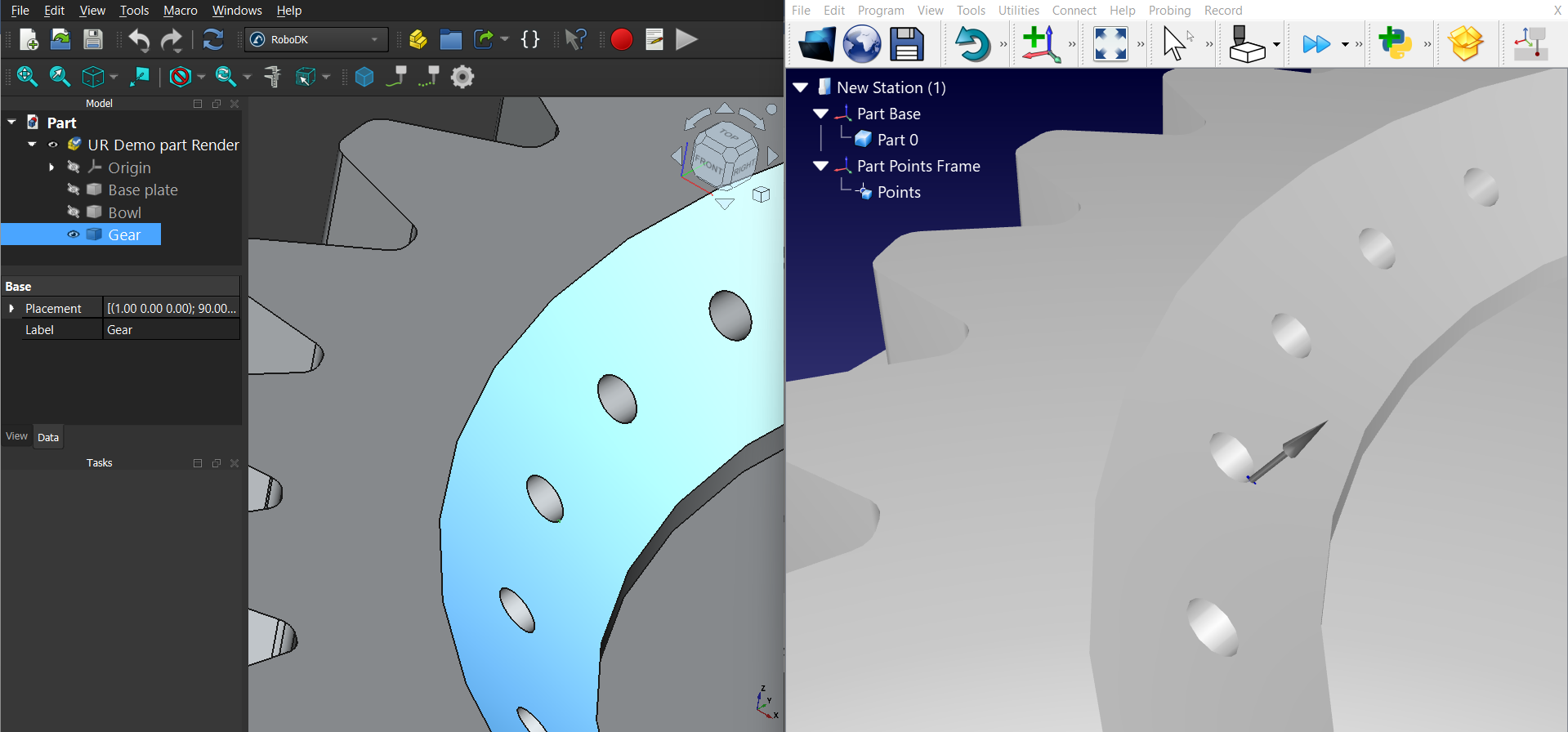
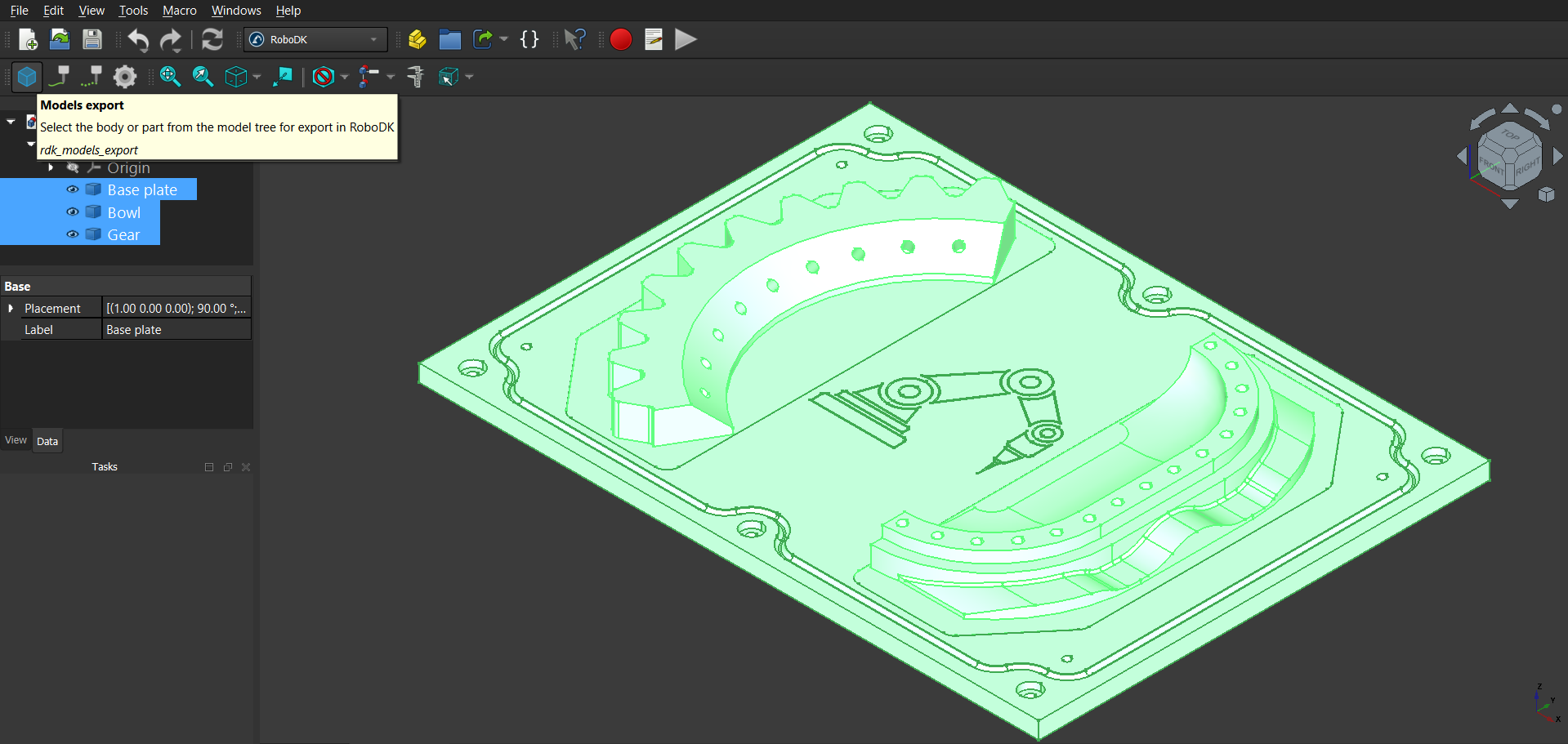
Modelle laden
Die Schaltfläche „Lastmodelle“ lädt das ausgewählte 3D-Modell oder Komponenten des Teils aus FreeCAD in RoboDK.
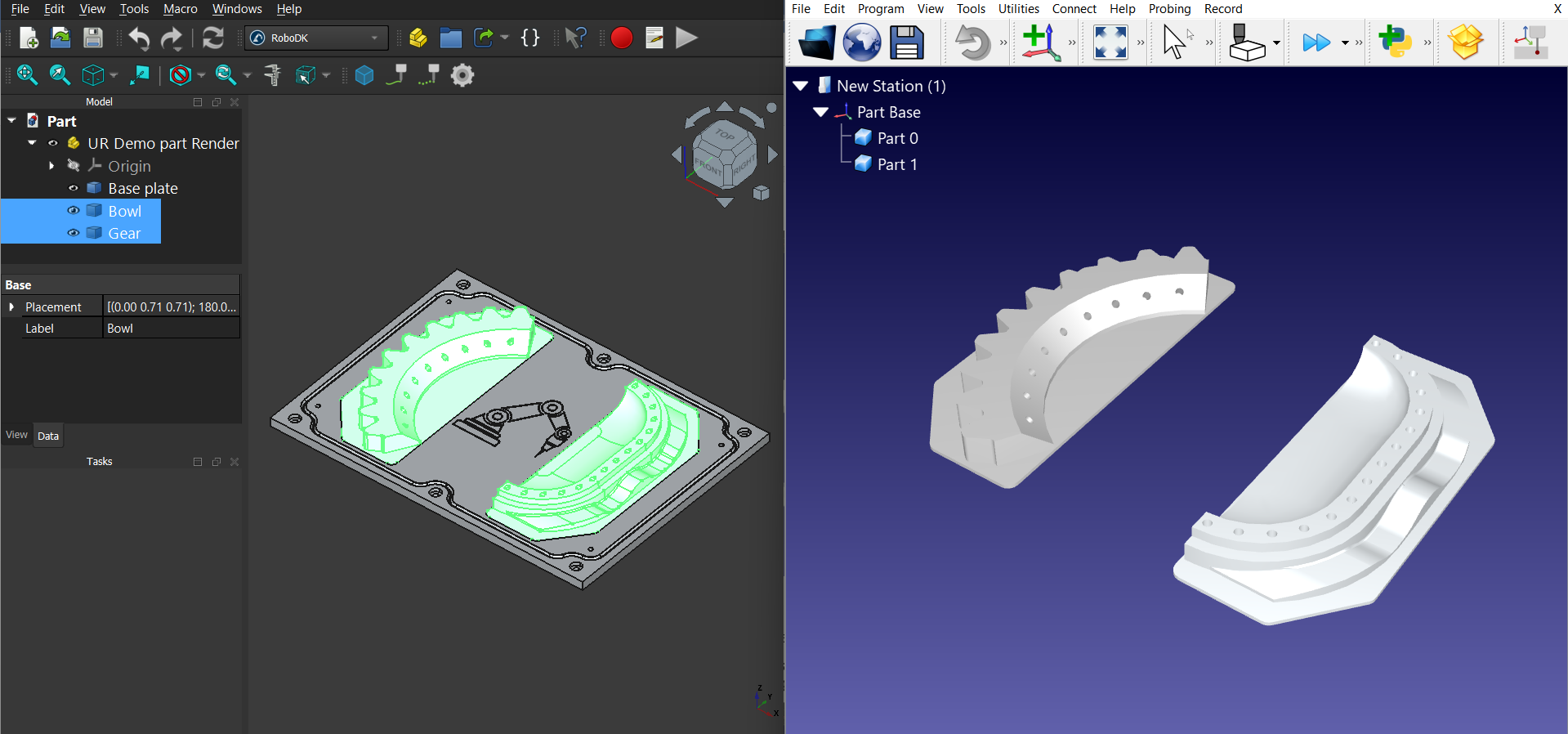
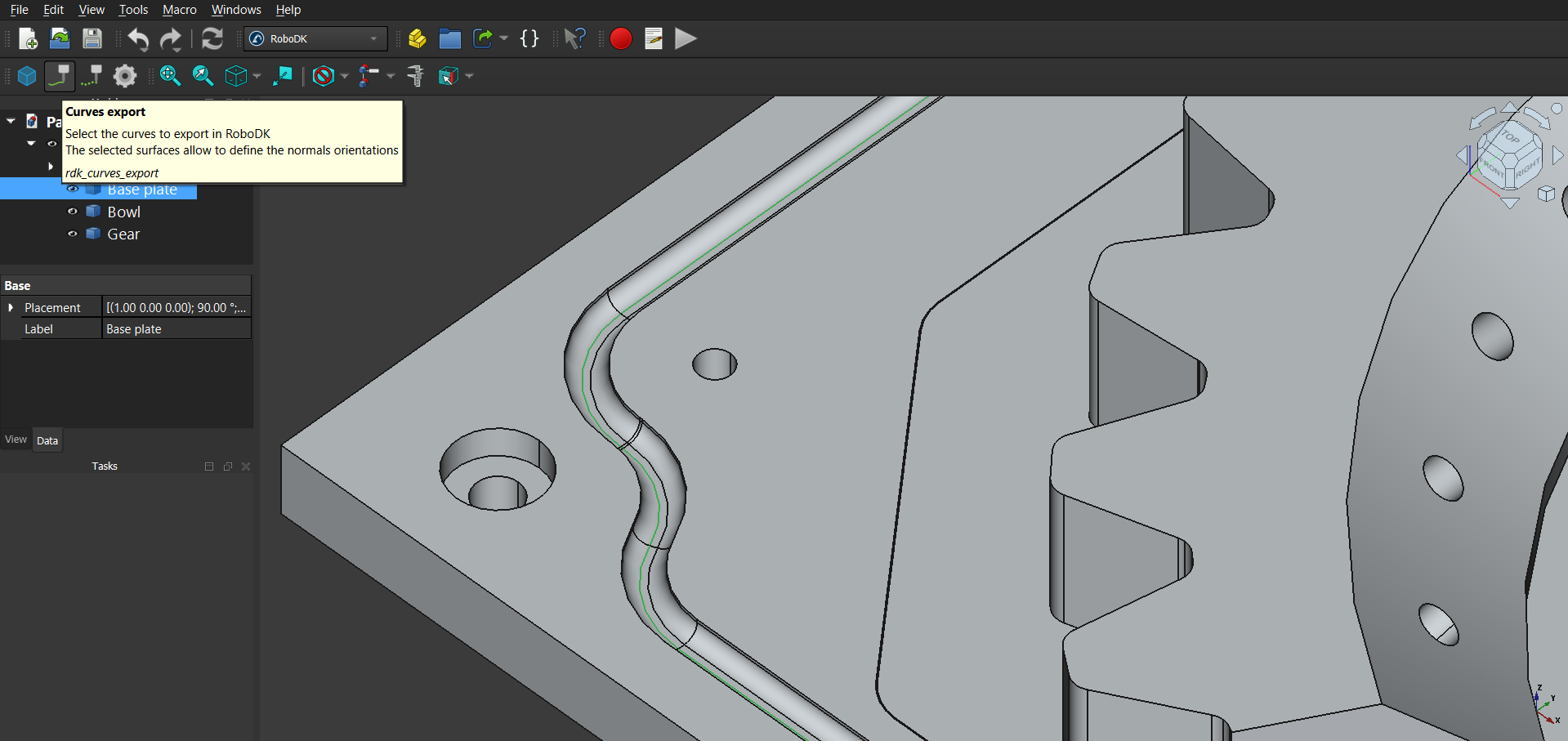
Kurven laden
Die Schaltfläche „Kurven laden“ lädt die ausgewählten Kurven (Kanten) in RoboDK.
Hinweis: Sie können optional eine oder mehrere Flächen auswählen, um die Kurvennormalen zu definieren. Wenn zwei benachbarte Flächen ausgewählt sind, werden die Normalen so ausgerichtet, dass sie der Winkelhalbierenden des entsprechenden Winkels entsprechen (falls zutreffend).
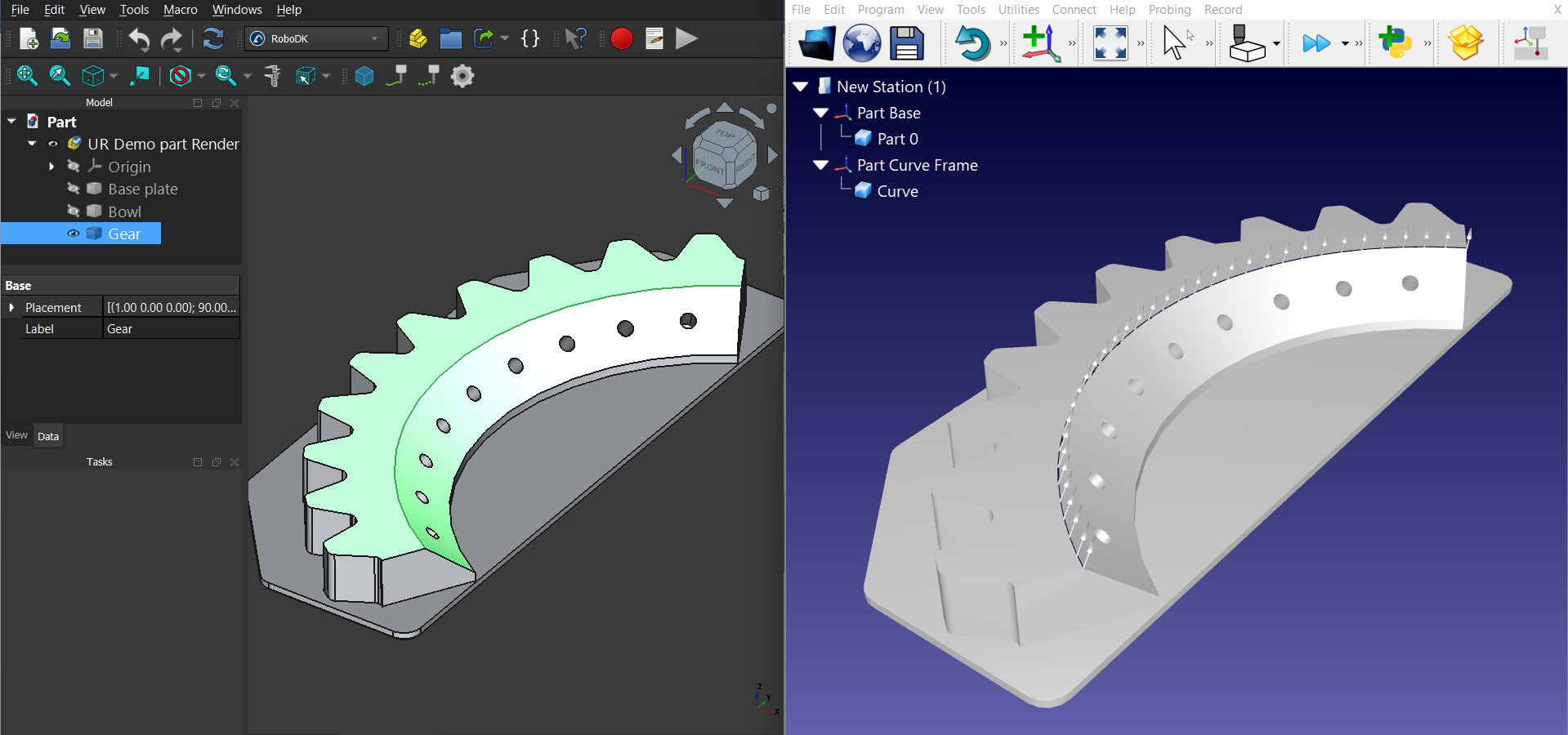
Punkte laden
Die Schaltfläche „Punkte laden“ lädt die ausgewählten Punkte in RoboDK.
Hinweis: Sie können zusätzlich eine Fläche auswählen, um die Normalen der Punkte zu definieren.
Add-in-Einstellungen
Wählen Sie „Einstellungen“, um die Einstellungen für das RoboDK-Add-in für FreeCAD zu öffnen.
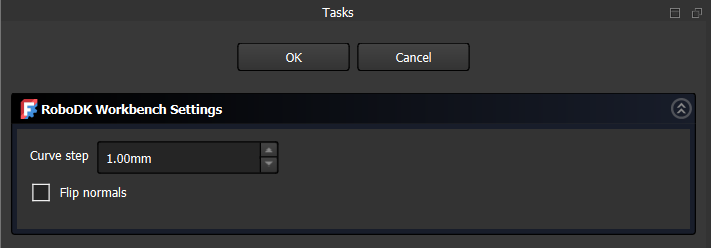
Sie können die folgenden Optionen ändern:
1.Kurvenabstand – Wert für den Kurvenabstand der exportierten Kurven.
2.Normale umkehren – Ändert die Ausrichtung der Normalen für exportierte Flächen oder Punkte.
Beispiel
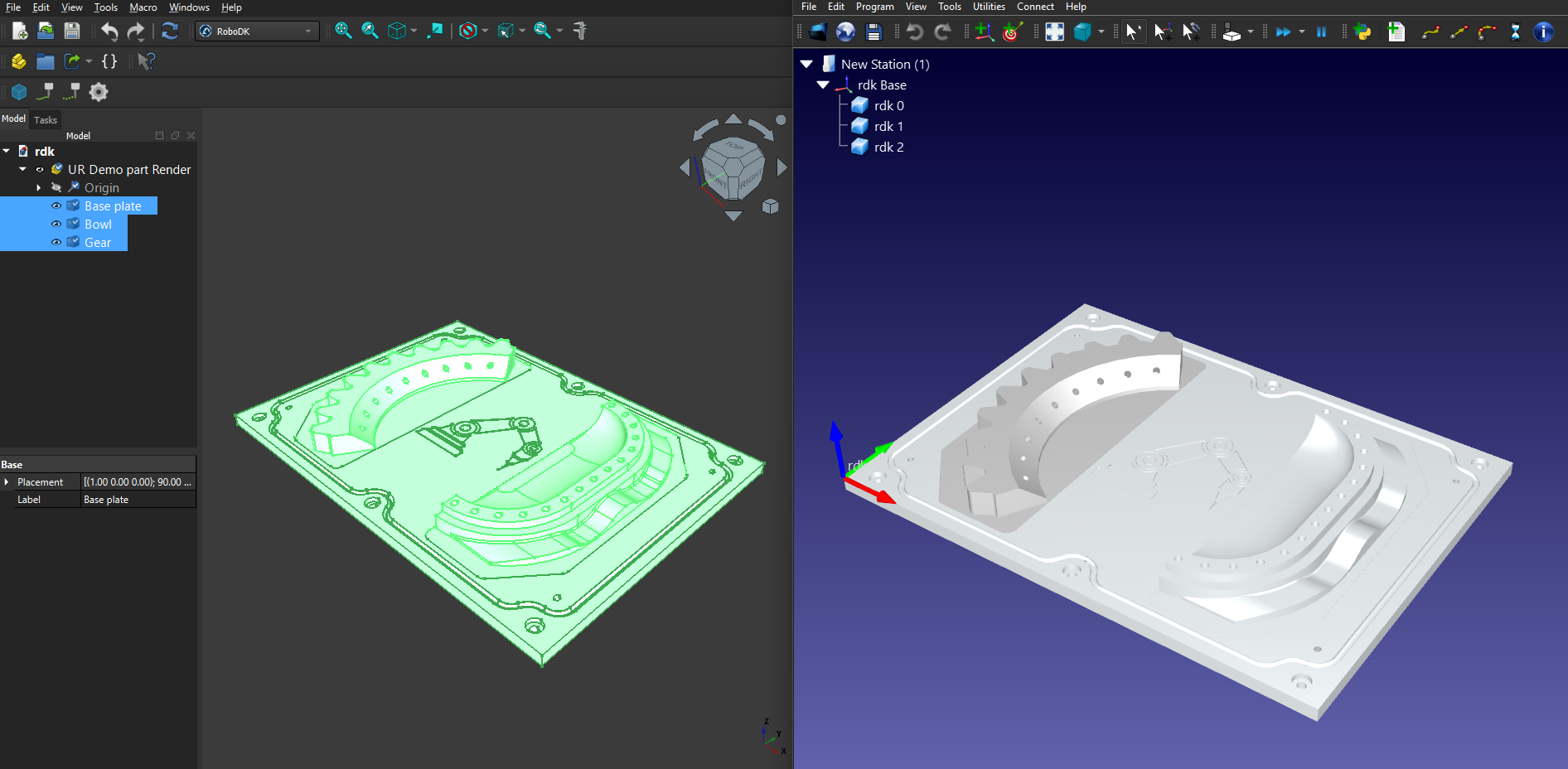
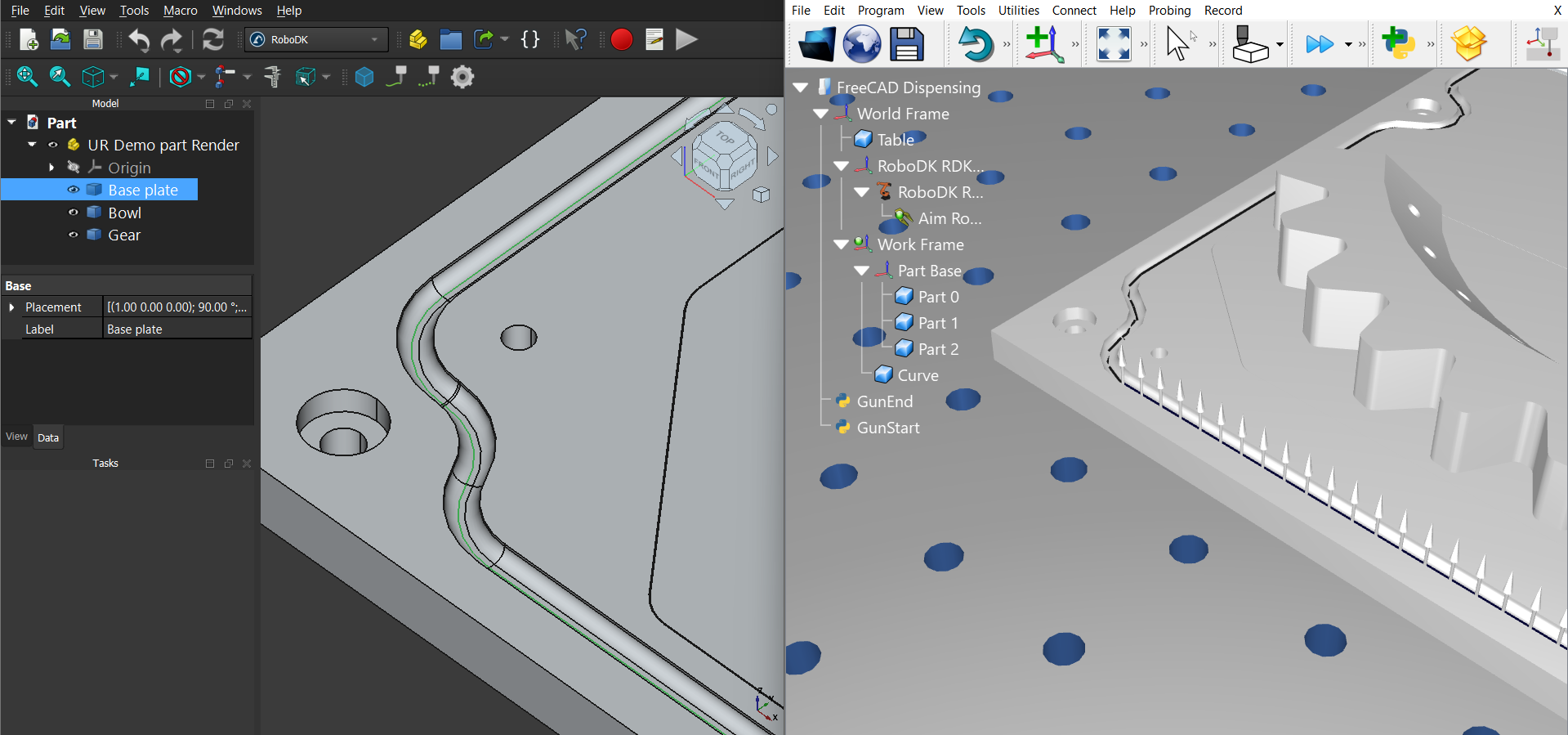
Dieses Beispiel zeigt, wie Sie ein 3D-Modell und eine ausgewählte Kurve (Kante) aus FreeCAD in RoboDK laden können.
1.Laden Sie das Modell in FreeCAD, indem Sie auf die Schaltfläche „Modell laden“ klicken.
2.Richten Sie Ihre Station in RoboDK mit einem Roboter und anderen erforderlichen Objekten in der Umgebung ein.
3.Wählen Sie aus dem FreeCAD-Modellbaum die Teile oder Körper Ihres Modells aus, die Sie in RoboDK laden möchten.
4.Wählen Sie in der Registerkarte „RoboDK-Add-in“ von FreeCAD die Option „Modell laden“, um die ausgewählten Modellteile in RoboDK zu laden.
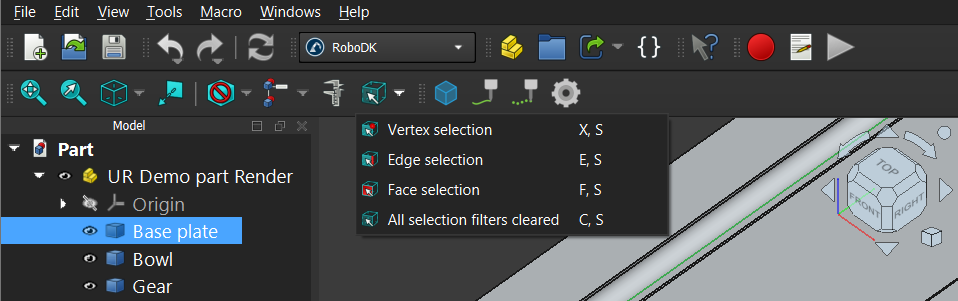
5.Wählen Sie die Kanten (Kurven) aus, die Sie in RoboDK sehen möchten, und klicken Sie in der Registerkarte „RoboDK-Add-in“ in FreeCAD auf „Kurven laden“.
6.Wenn Sie die Ausrichtung der Kurvennormalen festlegen möchten, wählen Sie die entsprechenden Flächen aus, um deren Winkel zu definieren, während Sie die Kurven auswählen.
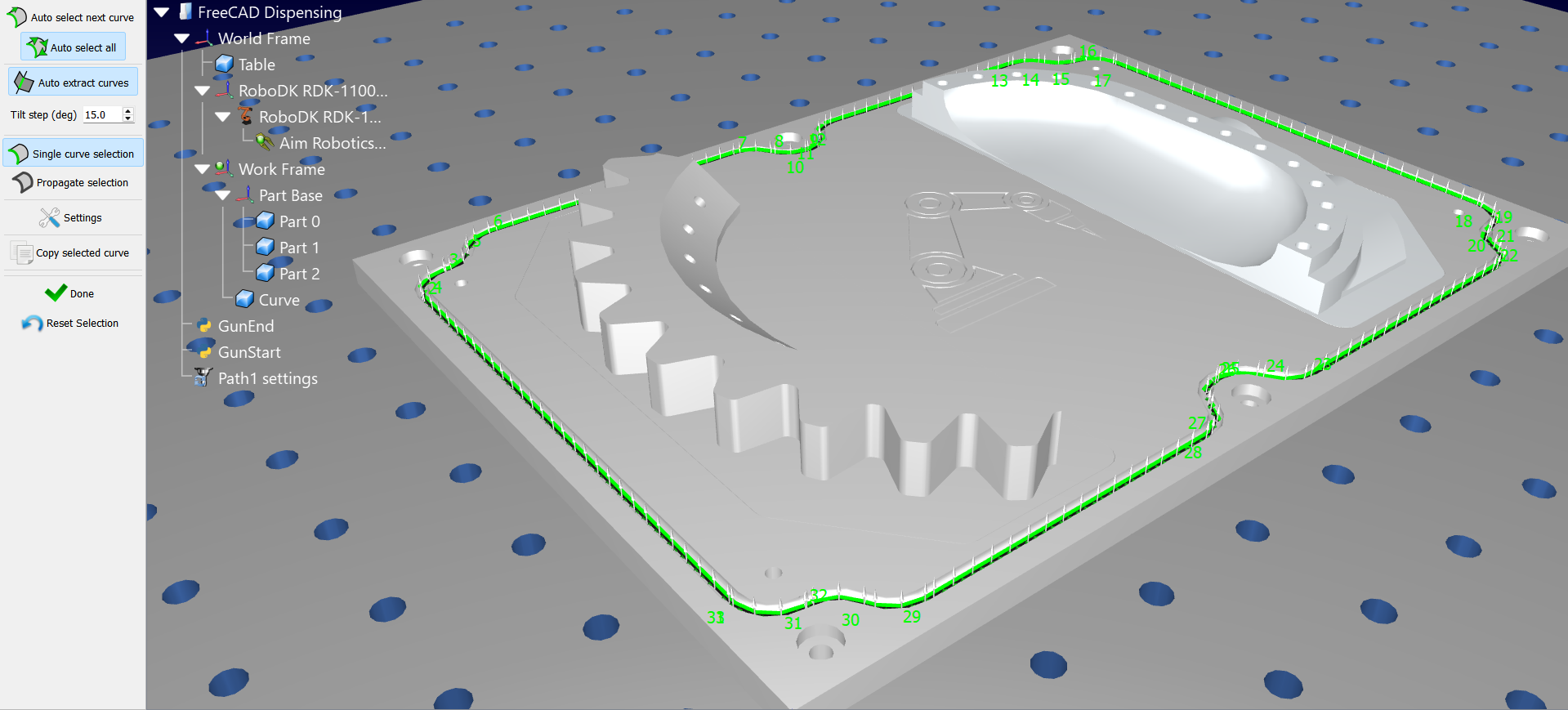
7.Überprüfen Sie das Exportergebnis in RoboDK.
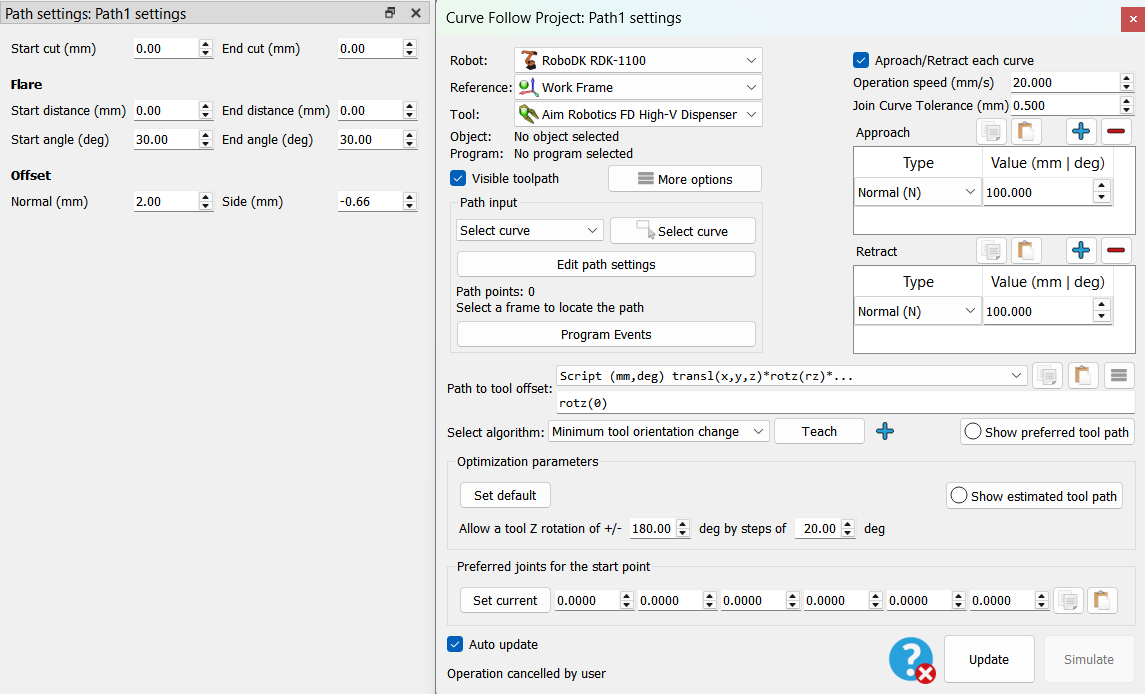
8.Erstellen Sie ein Kurvenfolgeprojekt (unter „Utilities“) mit den erforderlichen Änderungen an Parametern wie Versätzen und Betriebsgeschwindigkeit.
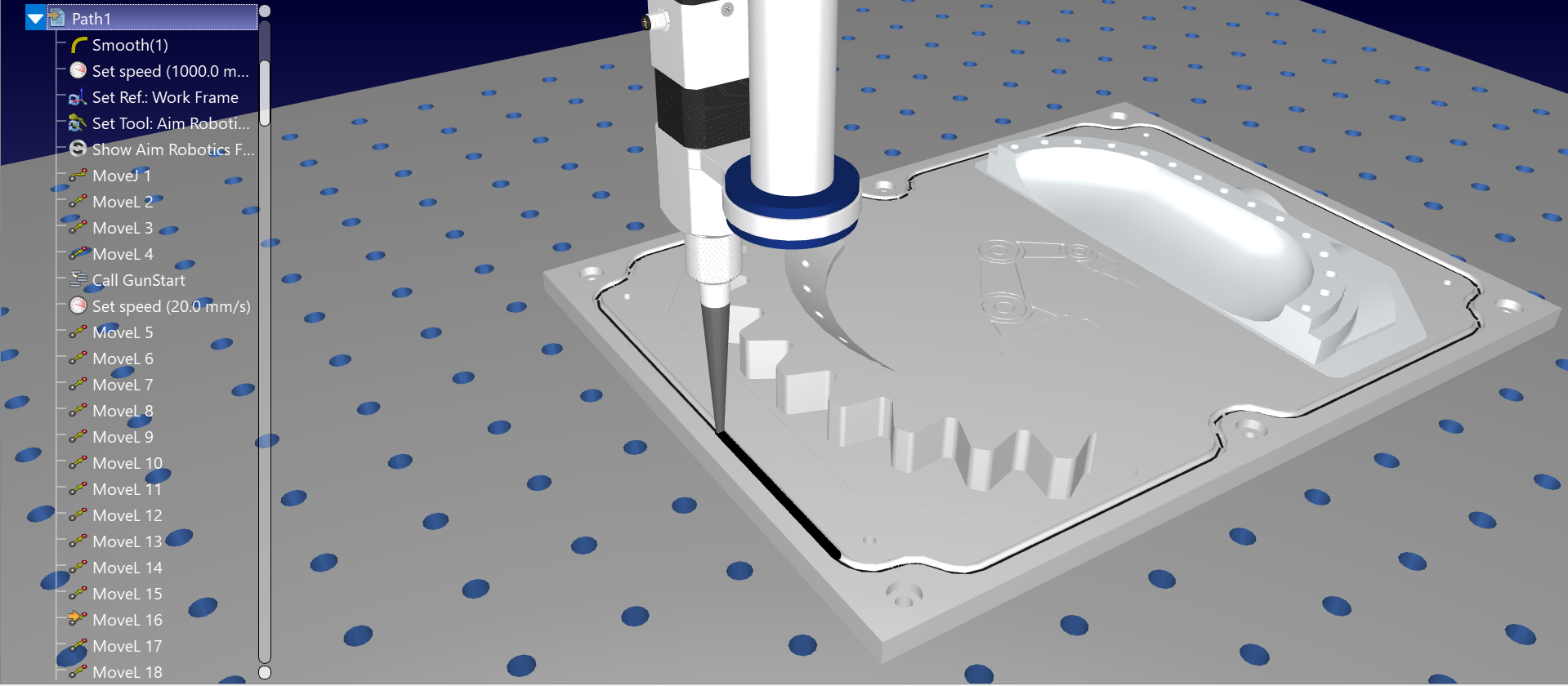
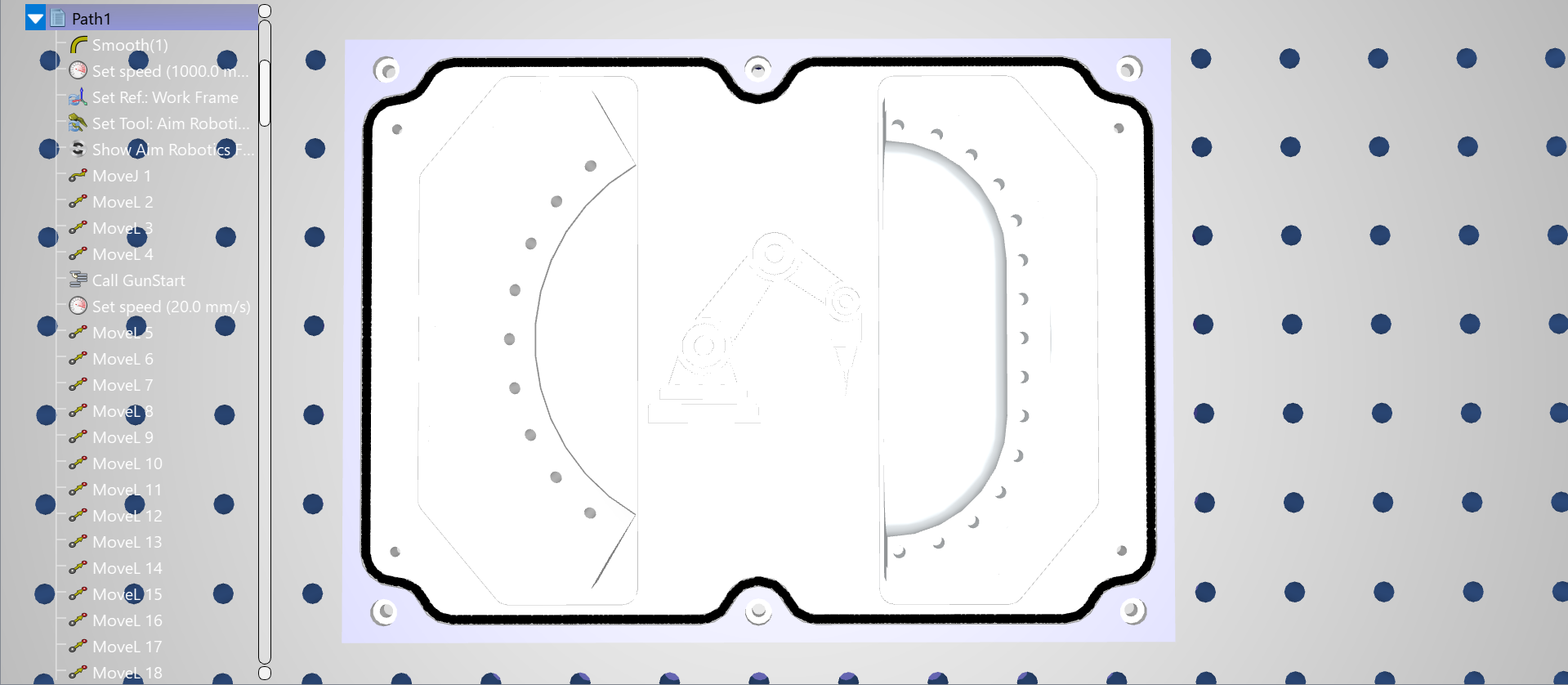
9.Nachdem das Programm für die Bahn für dieses Projekt erstellt wurde, klicken Sie mit der rechten Maustaste darauf, um „Anweisungen anzeigen“ zu aktivieren. Sie können nun das Programm bearbeiten, um Python-Skripte „GunStart“ und „GunEnd“ (mit „Program Call Instruction“) hinzuzufügen, um das Dosieren zu simulieren. Ändern Sie die erforderlichen Parameter wie Farbe und Radius des zu dosierenden Materials, indem Sie das Skript „GunStart“ bearbeiten.
Manuelle Installation
Dies sind manuelle Schritte zur Einrichtung des RoboDK-Add-ins für FreeCAD. Sie sollten diese Schritte befolgen, wenn das RoboDK-Add-in für FreeCAD nicht standardmäßig automatisch mit dem RoboDK-Installationsprogramm installiert wurde:
1.Stellen Sie sicher, dass Sie die neueste Version von RoboDK verwenden: https://robodk.com/download.
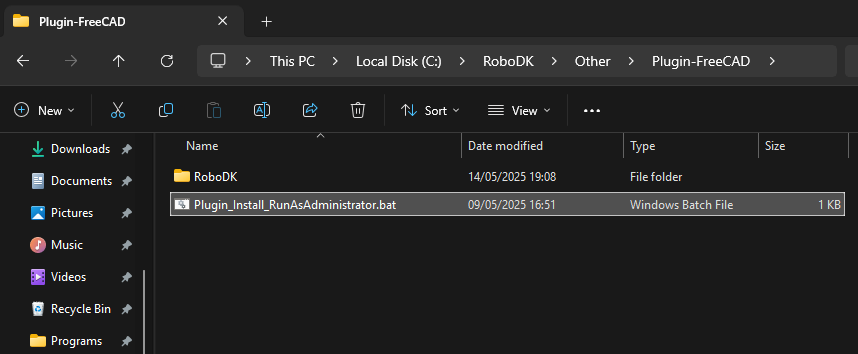
2.Die erforderlichen Dateien zur Installation des RoboDK-Add-ins für FreeCAD finden Sie im Ordner: C:\RoboDK\Other\Plug-in-FreeCAD\.
3.Klicken Sie mit der rechten Maustaste auf die Datei „Plugin_Install_RunAsAdministrator.bat“ und wählen Sie „Als Administrator ausführen“.
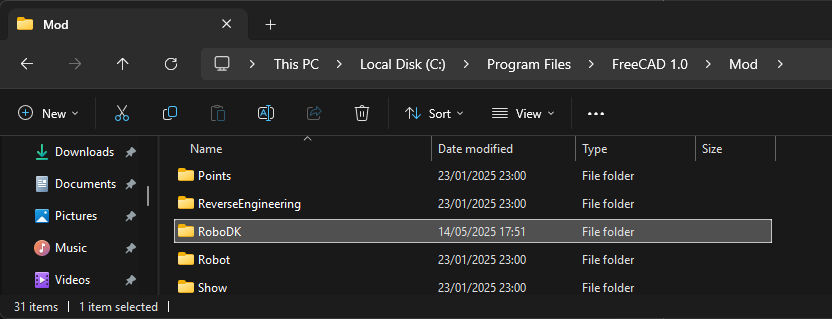
Sollte dieser Vorgang fehlschlagen, können Sie den RoboDK-Ordner in den FreeCAD-Mod-Ordner kopieren ( C:\Program Files\FreeCAD 1.0\Mod ):