Auto Setup
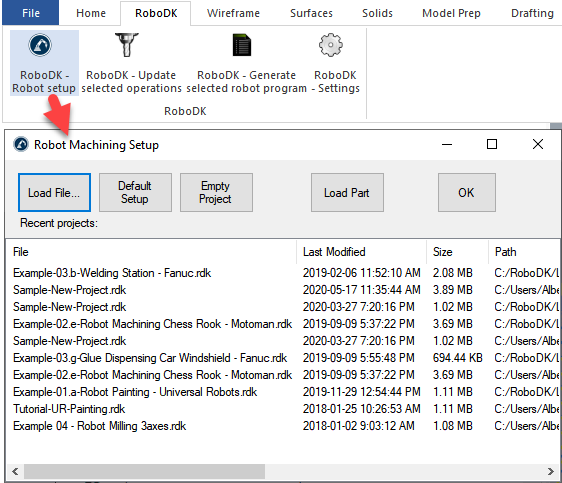
Die Schaltfläche Robot setup 
●Load File…: Wählen Sie eine Datei aus, um sie mit RoboDK zu öffnen, und verwenden Sie diese als Standardprojekt für Ihr Mastercam-Projekt.
●Default Setup: Richten Sie eine neue Station mit einem Standard-Roboter, einer Spindel und einem Referenzrahmen ein. Das Teil wird außerdem automatisch nach RoboDK exportiert.
●Empty Project: Öffnen Sie RoboDK mit einem neuen leeren Bildschirm, damit der Benutzer eine neue Konfiguration erstellen kann. Weitere Informationen zum Einrichten eines neuen Projekts von Grund auf finden Sie im Abschnitt Erste Schritte.
●Load Part: Laden Sie das Teil von Mastercam in RoboDK (das Teil wird als STL-Datei gespeichert und automatisch geladen).
Besuchen Sie den Abschnitt Roboter-Bearbeitung, um weitere Informationen über die Einstellungen einer neuen Simulation zu erhalten.
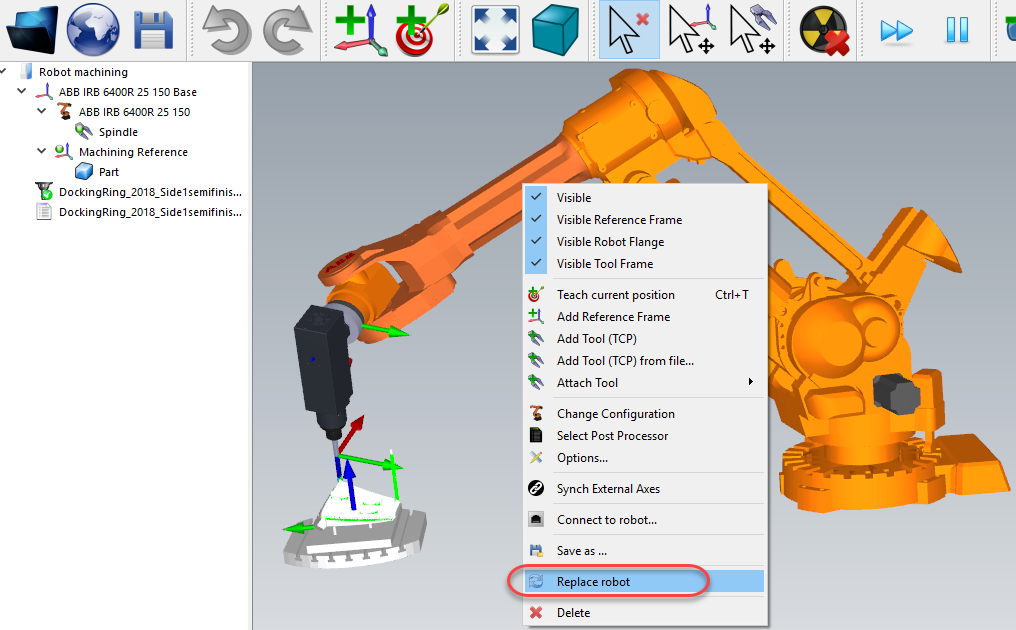
Sie können den Roboter einfach wechseln, das Werkzeug und/oder den Bezugsrahmen ändern. Führen Sie zum Beispiel die folgenden Schritte aus, um den Roboter zu ändern:
1.Rechtsklick auf einen Roboter
2.Wählen Sie Replace robot (wie in der Abbildung gezeigt)
3.Wählen Sie den neuen Roboter aus
Das RoboDK-Installationsprogramm stellt standardmäßig nur einige wenige Roboter zur Verfügung, es ist jedoch möglich, weitere Roboter aus der Online-Bibliothek herunterzuladen.
Weitere Informationen zum Hinzufügen eines Roboterwerkzeugs finden Sie im Abschnitt Erste Schritte.
Speichern Sie das Projekt, um die Änderungen beizubehalten, indem Sie Datei➔Speichern der Station (Strg+S) wählen.