Plugin-Einstellungen
Wählen Sie RoboDK-Settings, um die Einstellungen im Zusammenhang mit dem RoboDK-Plugin für Mastercam zu öffnen.
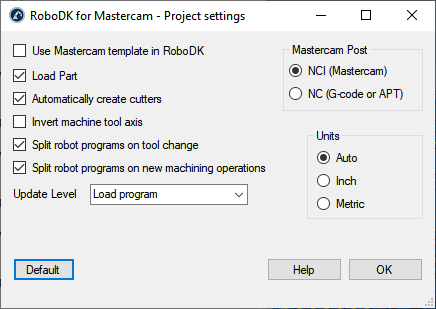
Unter anderem können Sie die folgenden Optionen ändern:
1.Verwenden Sie die Mastercam-Vorlage anstelle der RoboDK-Vorlage (die 3D-Navigations- und Farbvorlagen in RoboDK entsprechen dem Mastercam-Stil). Stellen Sie sicher, dass Sie diese Vorlage in RoboDK in Werkzeuge➔Optionen➔Andere aktiviert haben.
2.Laden und aktualisieren Sie das Werkstück in RoboDK jedes Mal, wenn Sie ein neues Roboterbearbeitungsprojekt einstellen.
3.Werkzeugfräser automatisch erstellen. In diesem Fall werden neue Werkzeuge automatisch in Bezug auf das erste Werkzeug des Roboters (Werkzeughalter) erstellt und der TCP wird um die Gesamtwerkzeuglänge in Bezug auf den Werkzeughalter versetzt.
4.Wenn Sie die Option Invert machine tool axis aktivieren, können Sie die Werkzeugmaschinenachse umkehren und automatisch die Z-Achse Ihres Werkzeugs zur Innenseite des Werkzeugs richten (anstatt nach außen).
5.Verwenden Sie NC-Dateien (wie APT- oder G-Code) anstelle von NCI-Dateien. RoboDK kann die folgenden Dateien lesen, um Robotersimulationen und -programme zu generieren:
a.NCI-Dateien: Mastercam-eigener Werkzeugweg.
b.NC-Dateien (G-Code-Dateien).