RoboDK-Add-In für Rhino
Das RoboDK-Add-In für Rhino ermöglicht Ihnen, die parametrische Modellierung von Rhino mit RoboDK für die Robotersimulation und Offline-Programmierung zu kombinieren.
Mit dem RoboDK-Add-In für Rhino können Sie 3D-Modelle, die in Rhino erstellt wurden, einfach in RoboDK laden. Mit diesem Plug-in können Sie mehr als 50 verschiedene Roboterhersteller und 500 Roboter direkt aus Rhino programmieren.
Roboterprogramme können direkt aus einer Gruppe von Kurven, Punkten oder CAM-Programmen (z.B. APT-Dateien oder G-Code-Dateien) generiert werden. Roboter können einfach als 5-Achsen-Maschinen für eine Vielzahl von Fertigungsanwendungen wie Bohren, Schweißen, Schneiden, 3D-Drucken oder Roboterbearbeitung programmiert werden. Weitere Informationen finden Sie im Abschnitt Roboter-Bearbeitung.
Der Abschnitt über Roboter-Postprozessoren zeigt eine Liste der unterstützten Robotermarken und Controller. Es ist auch möglich, Postprozessoren zu ändern oder neue Postprozessoren zu erstellen, um die Programmgenerierung anzupassen.
Hinweis: Lesen Sie diesen Abschnitt Erste Schritte, wenn Sie RoboDK zum ersten Mal verwenden.
Das RoboDK-Plug-in für Rhino funktioniert für Rhino 5 und Rhino 6. Das RoboDK-Plug-in für Rhino ist kostenlos, bestimmte Optionen in RoboDK erfordern jedoch den Erwerb einer Lizenz.
Installation
Folgen Sie diese Schritte, um das RoboDK-Plug-in für Rhino zu installieren:
Downloads:
1.Rhino herunterladen und installieren.
2.Laden Sie RoboDK herunter und installieren Sie es. Die Rhino-Installationsprogrammdateien werden in C:/RoboDK/Other/Plugin-Rhino/ geladen.
3.Laden Sie das RoboDK-Plugin für Rhino direkt oder von Food4Rhino herunter.
4.Entpacken Sie die Dateien.
Doppelklicken Sie auf die RoboDK.RUI-Installationsprogrammdatei und folgen Sie die Anweisungen zur Installation des Plugins. Wenn dieser Vorgang fehlschlägt, können Sie das Plugin manuell installieren.
Das RoboDK-Plug-in für Rhino enthält Rhino-Befehle (beginnend mit dem Präfix RoboDK_...), Grasshopper-Komponenten und eine Symbolleiste. Jede Schaltfläche der Symbolleiste ist mit einem RoboDK-Befehl verknüpft.
Hinweis: Wenn Sie RoboDK vom Rhino-Plug-in aus starten, werden die Standardeinstellungen von RoboDK so geändert, dass diese der 3D-Mausnavigation und dem Fensterstil von Rhino entsprechen. Dieses Verhalten kann in den Plugin-Einstellungen geändert werden oder durch Festlegen der RoboDK-Standardeinstellungen.
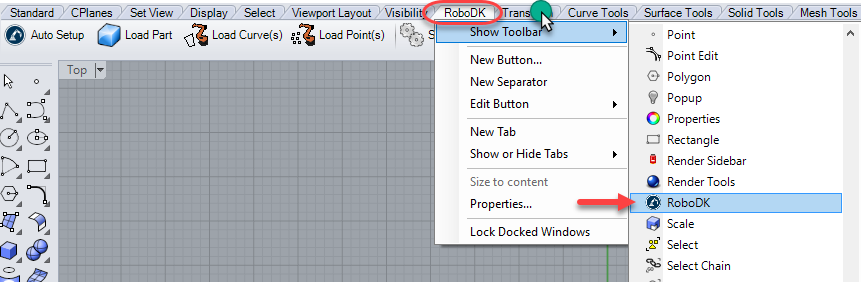
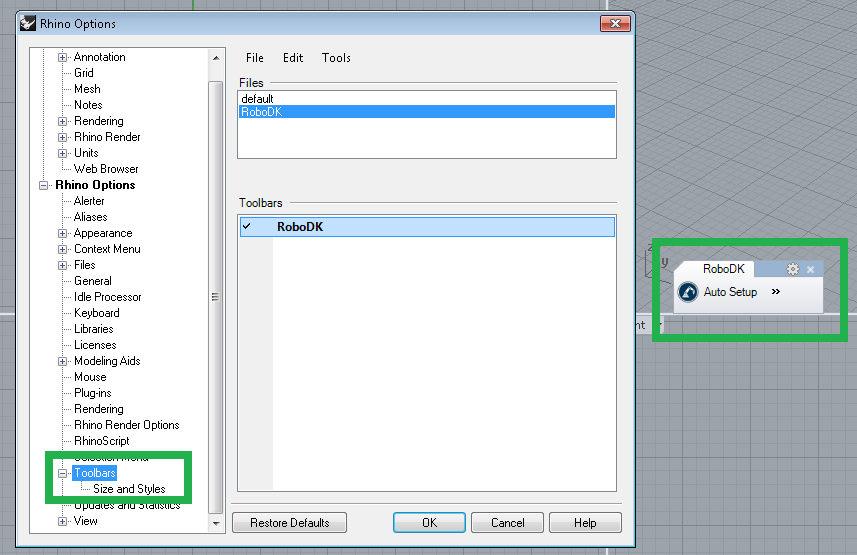
Hinweis: Wenn die RoboDK-Symbolleiste in Rhino nicht angezeigt wird, sollten Sie diese aktivieren, indem Sie Tools-Options wählen, Toolbars auswählen und die RoboDK-Symbolleiste aktivieren. Wie in der folgenden Abbildung gezeigt.
Rhino- Symbolleiste
Die für Rhino bereitgestellte Standardsymbolleiste enthält 5 Schaltflächen:

●
●
●
●
●
Der Hauptunterschied zwischen Auto-Setup und Load Curve(s) oder Load Point(s) besteht darin, dass Auto-Setup das Teil lädt und ein neues Kurven-/Punktfolgeprojekt erstellt. Die Verwendung von Load Curve(s) oder Load Point(s) ist schneller und aktualisiert lediglich die vorhandenen Geometrie-Features in RoboDK unter behält die zuvor definierten Einstellungen.
Hinweis: Jede Schaltfläche entspricht einem Befehl. Alle RoboDK-Befehle haben das Präfix RoboDK_.
Hinweis: Wenn Sie mehr als ein Objekt aus Rhino laden möchten, sollten Sie die Objekte umbenennen, sobald sie in RoboDK geladen wurden.
Grasshopper-Symbolleiste
Das RoboDK-Plug-in für Rhino wird mit 3 Grasshopper-Komponenten geliefert:

●
●
●
Alle Komponenten geben einen Status (S) in Prozent zurück (100% bedeutet, dass der Roboter das Programm erfolgreich abschließen kann). Außerdem kann von jeder Komponente eine detaillierte Meldung (M) gelesen werden.
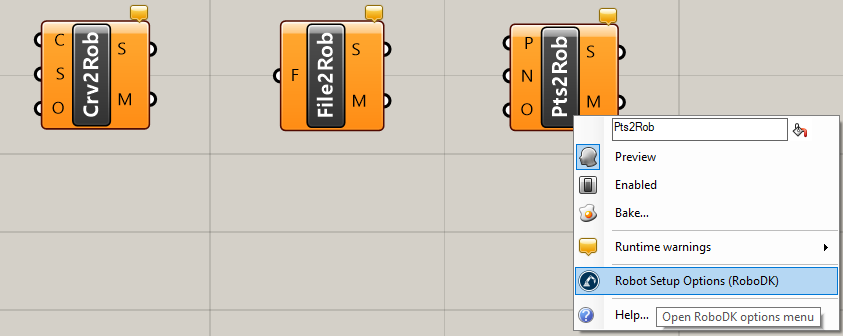
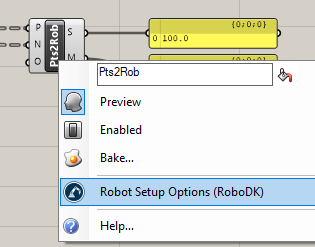
Sie können mit der rechten Maustaste auf eine beliebige Komponente klicken und in Robot Setup Options (RoboDK) wählen, um die für eine Komponente spezifischen Einstellungen anzupassen.
Einstellungen
Jede Grasshopper-Komponente enthält spezifische Einstellungen, die angepasst werden können. Sie können auch die Standardeinstellungen ändern, die für die RoboDK-Befehle (oder Schaltflächen der Symbolleiste) gelten, indem Sie die Schaltfläche-Einstellungen wählen.
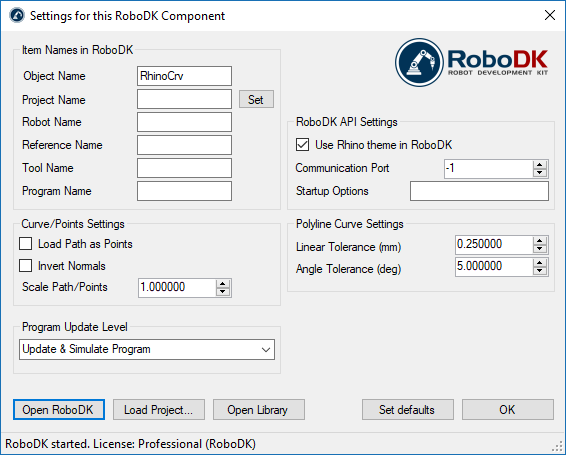
●Object Name - Legen Sie den Namen des Kurven-/Punktobjekts fest, das in RoboDK geladen werden soll. Das Objekt in RoboDK wird bei jeder Neuberechnung der Bahn überschrieben. Dieser Wert wird ignoriert, wenn der Name des Objekts als Komponenteneingang (O) angegeben wird.
●Project Name - Legen Sie den Namen des RoboDK-Projekts/der RoboDK-Station (.RDK-Datei) fest, das/die verwendet werden soll. Wenn die Datei bereits geladen ist, wird das vorhandene Projekt verwendet. Wenn das in RoboDK geöffnete Projekt nicht mit dem Dateinamen übereinstimmt, wird das Projekt geöffnet, wenn der vollständige Pfad angegeben wird.
●Robot Name - Legen Sie den Namen des Roboterobjekts fest, das in RoboDK geladen werden soll. Der Robotername muss mit dem im RoboDK-Stationsbaum sichtbaren Namen übereinstimmen. Lassen Sie diesen Wert leer (Standardeinstellung), um den ersten verfügbaren Roboter zu verwenden.
●Reference Name - Legen Sie den Namen des Referenzrahmens fest, um die Bahn in Bezug auf den Roboter zu platzieren. Der Name sollte mit dem sichtbaren Namen im RoboDK-Stationsbaum übereinstimmen.
●Tool Name - Legen Sie den Namen des Werkzeugs (TCP) fest, das mit dem Roboter verwendet werden soll, um dem Pfad zu folgen. Der Name sollte mit dem im RoboDK-Stationsbaum sichtbaren Namen übereinstimmen.
●Program Name - Legen Sie den Namen der Programmdatei fest, die erzeugt wird.
Hinweis: Stellen Sie sicher, dass Sie die Option zum Generieren des Programms und des Codes wählen, um das Programm zu sehen.
●Load Path as Points - Aktivieren Sie diese Option, um das Objekt als Punkte und ein Punktfolgeprojekt in RoboDK zu erstellen. Dies ist für Fertigungsoperationen wie z. B. Bohren nützlich. Deaktivieren Sie diese Option, um den Pfad als Kurvenverfolgungsprojekt zu laden.
●Invert Normals - Aktivieren Sie diese Option, um die berechneten Oberflächennormalen umzukehren. Dadurch wird die Werkzeugausrichtung des Roboters umgedreht.
●Use Rhino Theme in RoboDK - Starten Sie RoboDK mit einem Rhino-Thema. Dazu gehört die Änderung des Verhaltens der Maus für die 3D-Navigation und die Änderung der Hintergrundfarbe. Diese Einstellungen gelten nur, wenn RoboDK mit Rhino gestartet wird. Diese Einstellungen können im Menü Werkzeuge-Optionen von RoboDK geändert werden.
●Communication Port - Stellen Sie den Kommunikationsport für die Kommunikation mit RoboDK ein. Mehrere Instanzen von RoboDK können gleichzeitig ausgeführt werden und unterschiedliche Konfigurationen verwenden, wenn ein anderer Port verwendet wird. Wenn dieser Wert auf -1 (Standard) eingestellt ist, wird der Standard-Port verwendet (20500).
●Startup Options - Legen Sie die Argumente fest, die beim ersten Start an RoboDK übergeben werden sollen. Um RoboDK beispielsweise leise zu starten, können Sie '/NOSPLASH /NOSHOW /HIDDEN' einstellen. Programme können auch dann noch generiert werden, wenn RoboDK nicht angezeigt wird. Weitere Informationen finden Sie im Abschnitt Kommandozeilen Optionender RoboDK-API.
●Linear Tolerance (mm) - Stellen Sie die lineare Genauigkeit fest, um Kurven in Punkte zu konvertieren.
●Angle Tolerance (mm) – Stellen Sie die Winkelgenauigkeit fest, um Kurven in Punkte zu konvertieren.
Schaltflächen:
●Open RoboDK - Öffnen Sie ein Projekt in RoboDK... Es wird ein neues Fenster mit zusätzlichen Optionen geöffnet.
●Load Project… - Laden Sie das RoboDK-Projekt (RDK-Datei), mit dem Sie diese Komponente verwenden möchten.
●Open Library - Öffnen Sie die Online-Bibliothek von RoboDK.
●Set defaults - Legen Sie die Standardeinstellungen für die Komponente fest.
●OK - Übernehmen Sie diese Einstellungen und schließen Sie dieses Fenster. Wenn Sie nicht OK wählen, werden die von Ihnen geänderten Einstellungen nicht übernommen.
Beispiele
Dieser Abschnitt zeigt grundlegende Beispiele zum Laden eines Rhino-Projekts in RoboDK für die Robotersimulation und Offline-Programmierung.
Gravierung einer Kuppel
Kuppelstreifen
Dieses Beispiel zeigt, wie eine Beispiel-RoboDK-Station (Standardeinstellung) geladen wird und wie ein in Rhino definierter Pfad von Kurven mit dem Roboter befolgt wird.
1.Laden Sie das Dome-Beispiel in Rhino.
2.Wählen Sie die Registerkarte RoboDK und wählen Sie Settings
3.Wählen Sie Load Project...
4.Wählen Sie Default Setup. RoboDK startet und lädt ein Beispielprojekt mit einem KUKA Roboter, einem Werkzeug (eine Spindel als Werkzeug 1) und einem Referenzrahmen (Referenz 1).
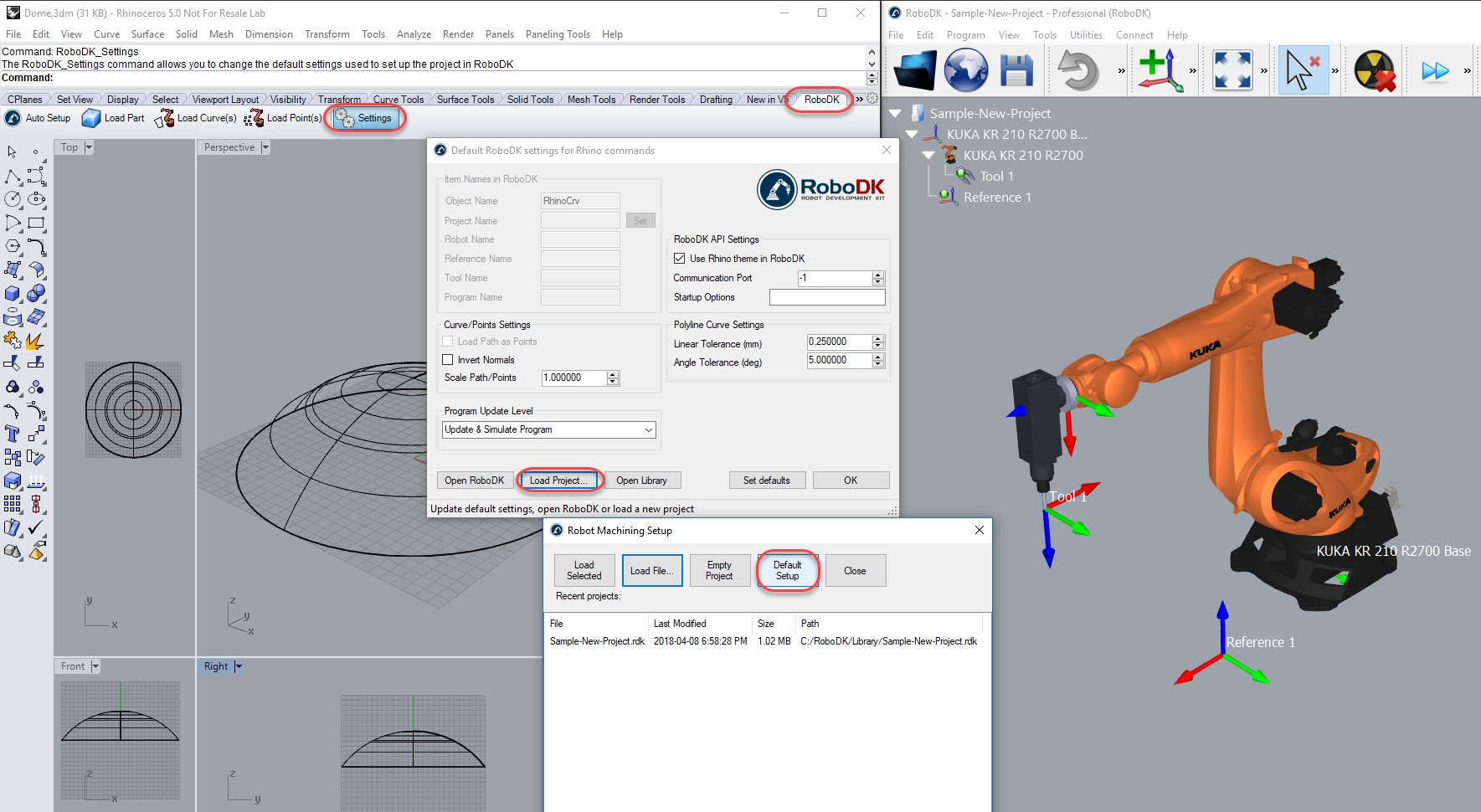
5.Schließen Sie das Einstellungsfenster oder wählen Sie OK.
6.Wählen Sie die Schaltfläche
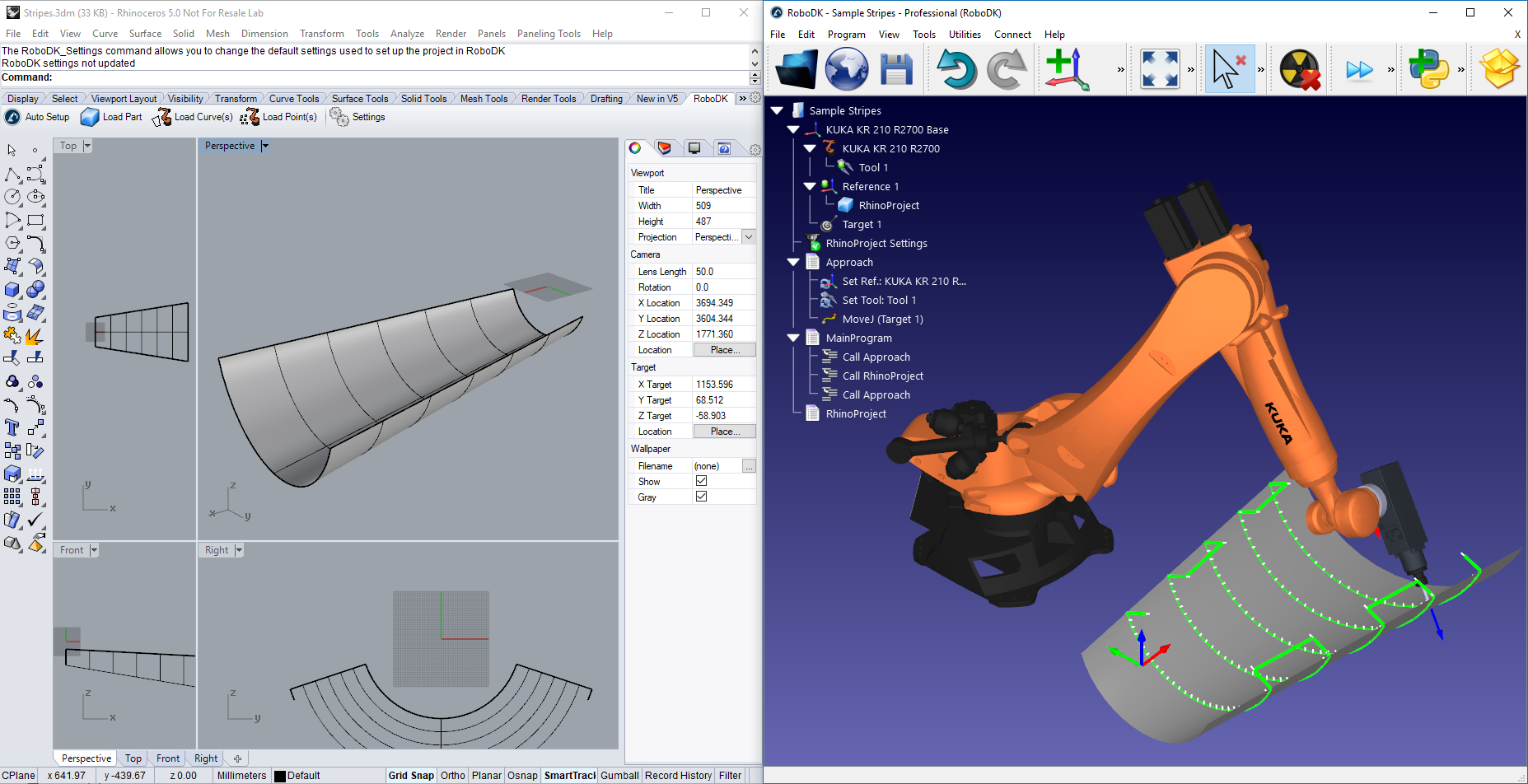
7.Markieren Sie alle Kurven und Flächen und drücken Sie die Entertaste (oder die rechte Maustaste). Das Projekt wird in RoboDK geladen, wie in der folgenden Abbildung gezeigt.
Sie sollten das auf dem aktiven Referenzrahmen (Referenz 1) geladene Teil und ein neues Kurvenverfolgungsprojekt in RoboDK sehen, das die Kurven mit dem aktiven Roboterwerkzeug (Werkzeug 1) folgt.
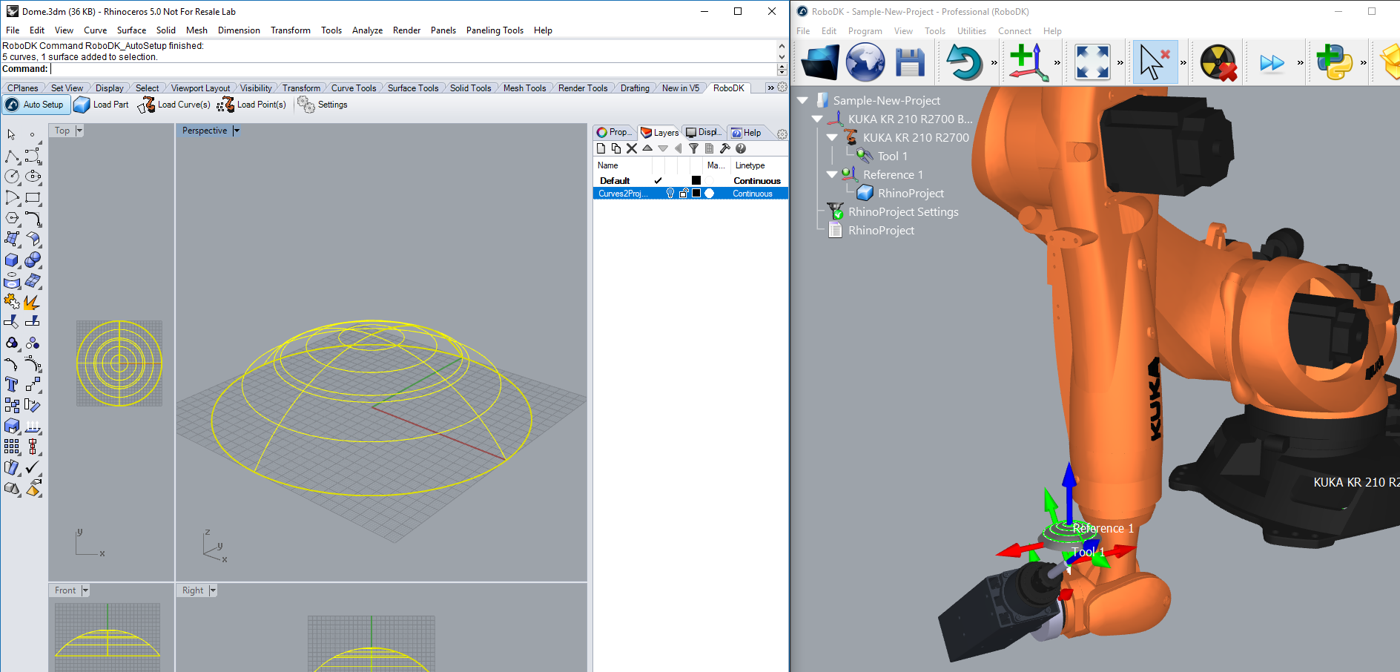
Sie können auch sehen, dass die Oberflächennormalen in die entgegengesetzte Richtung extrahiert wurden. Folgen Sie diese Schritte, um dieses Problem zu lösen:
8.Wählen Sie Settings
9.Haken Sie die Option Invert Normals.
10.Wählen Sie OK.
11.Wiederholen Sie die Schritte 6 und 7.
Sie sollten nun die Oberflächennormalen umgedreht sehen, und die Annäherungsbewegung kommt von der Oberseite des Teils. Der Roboter sollte in der Lage sein, sich ohne Probleme entlang des Werkzeugweges zu bewegen.
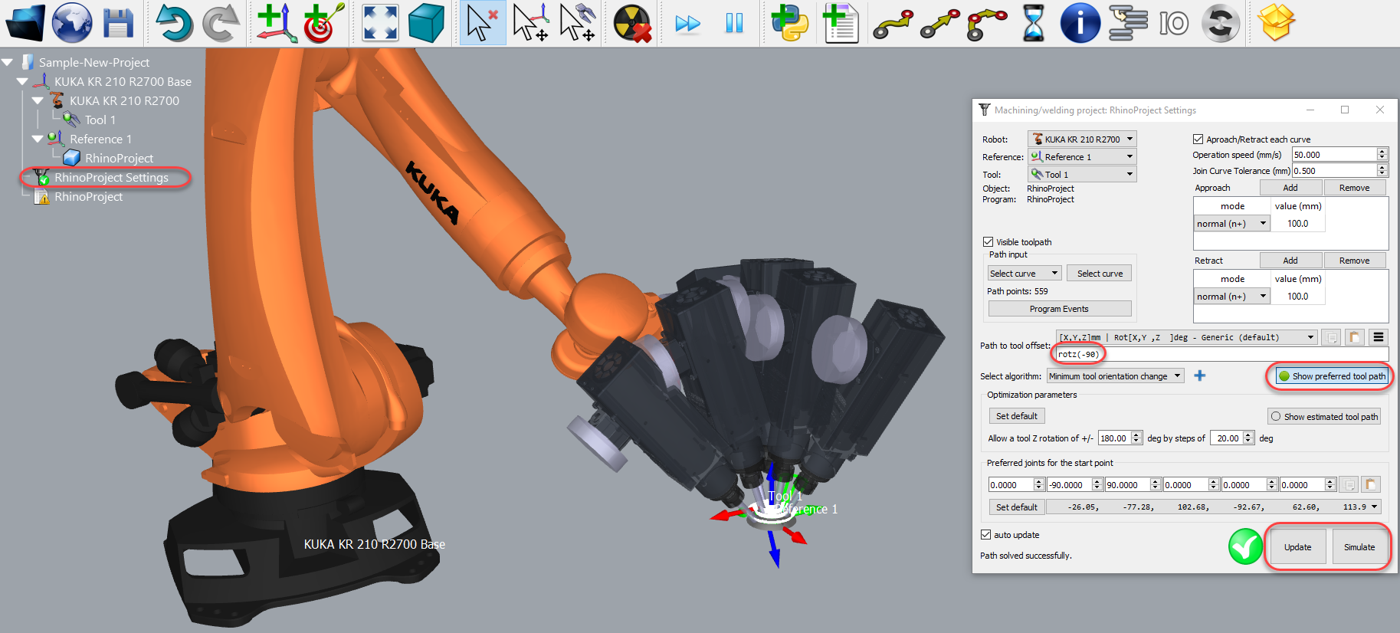
Doppelklicken Sie im RoboDK-Baum auf die RhinoProject-Settings
Zum Beispiel können Sie Bevorzugte Werkzeugbahn anzeigen auswählen, um die Standardausrichtung des Werkzeugs in Bezug auf das Teil zu sehen und zu ändern. Ändern Sie den Wert im Pfad zur Werkzeugkorrektur, um eine zusätzliche Drehung zu definieren. Dazu können Sie einen neuen Wert eingeben oder einfach das Mausrad verwenden, um eine schnelle Vorschau des Ergebnisses zu sehen.
Weitere Informationen zur Änderung dieser Einstellungen finden Sie im Abschnitt Roboter-Bearbeitung.
Wenn die Simulation schließlich das gewünschte Ergebnis liefert, können Sie das Programm generieren oder die Simulation exportieren:
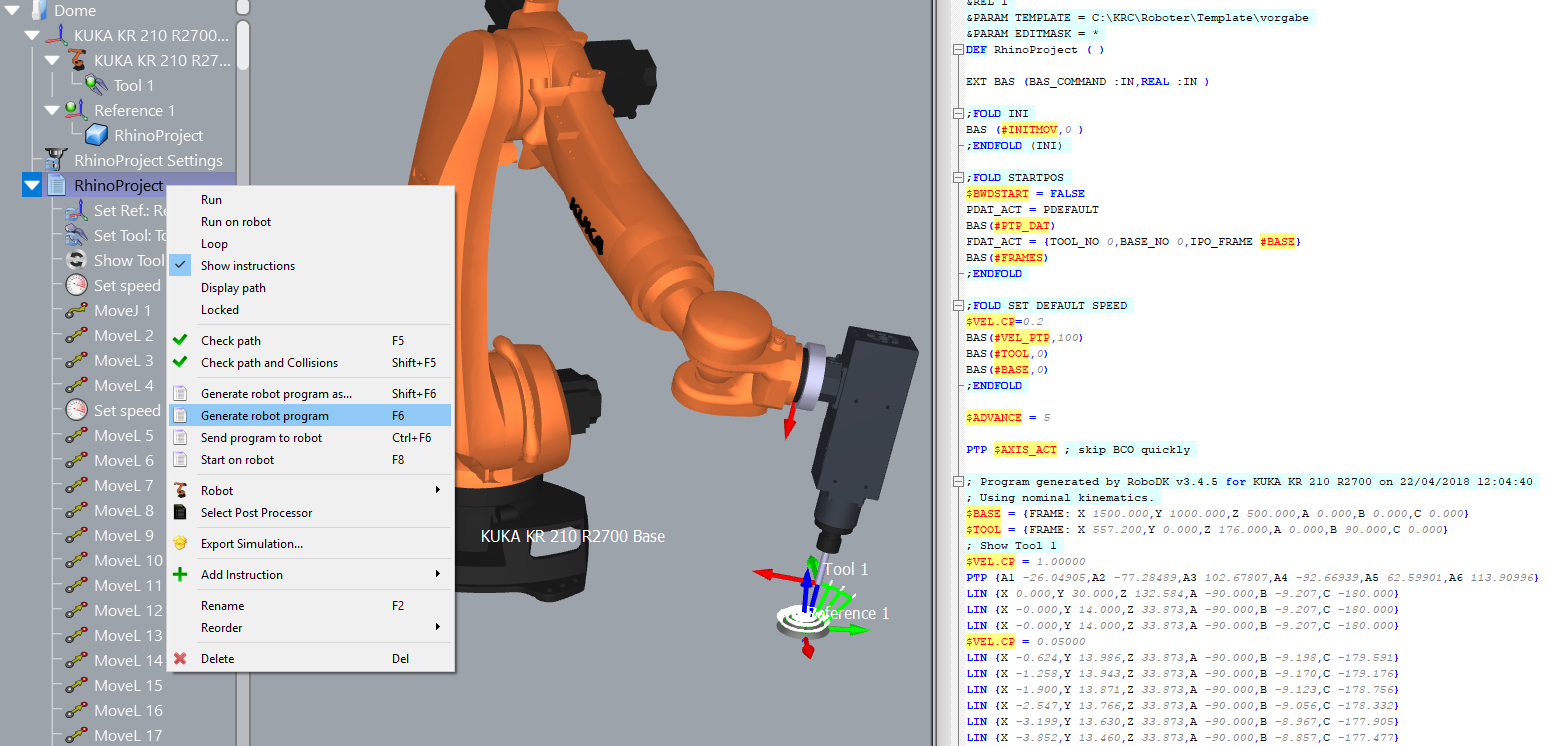
12.Klicken Sie mit der rechten Maustaste auf das Programm RhinoProject
13.Wählen Sie Erstellen eines Roboterprogramms (F6). Das Roboterprogramm wird generiert und angezeigt.
Grasshopper-Beispiel
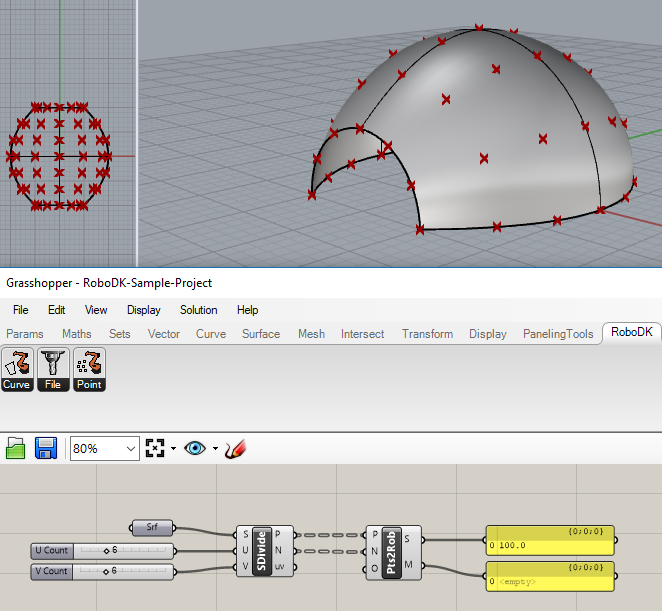
Dieses Beispiel zeigt, wie das RoboDK-Plug-in für Grasshopper verwendet wird, indem eine Fläche als Punktgitter geteilt und mit einem Roboter für einen Bohrvorgang in RoboDK verfolgt wird:
1.Laden Sie das mit dem RoboDK-Plug-in mitgelieferte Grasshopper-Beispiel (3dm-Datei und gh-Datei).
2.Klicken Sie mit der rechten Maustaste auf die Komponente Pts2Rob und wählen Sie Robot Setup Options (RoboDK). Wählen Sie Load Project... und wählen Sie Default Setup, um eine RoboDK-Beispielstation zu laden (dasselbe Beispielprojekt, das im vorherigen Abschnitt gezeigt wurde).
Optional können Sie den Objektnamen als Komponenten-Input (O) angeben. Sie können auch ein Projekt in den Komponentenoptionen angeben, so dass das gewünschte RoboDK-Projekt mit jeder Komponente verwendet wird.
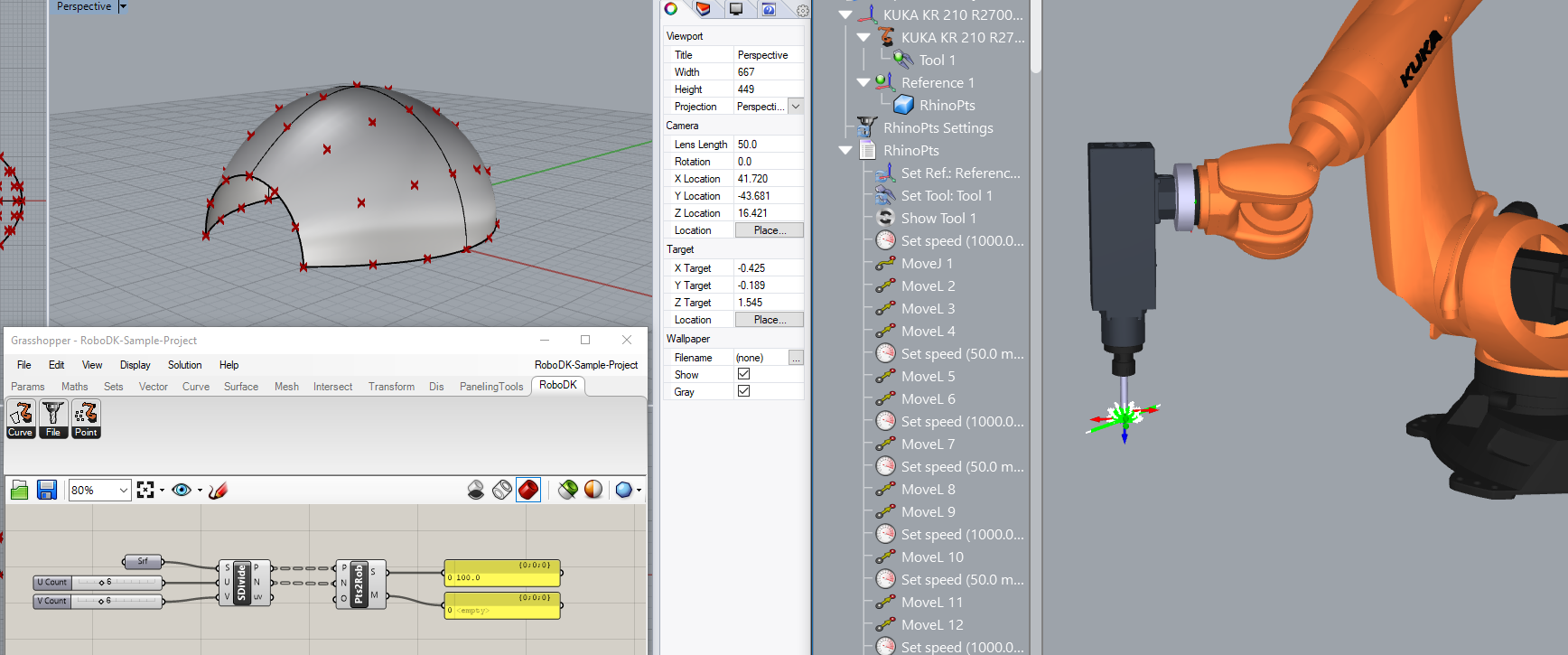
3.Wählen Sie in Grasshopper Solution➔Recompute (F5), um das Teil und das Programm in RoboDK zu aktualisieren.
Hinweis: Aktualisieren Sie die Robotereinrichtung in RoboDK. Doppelklicken Sie beispielsweise auf einen Bezugsrahmen oder einen Werkzeugrahmen, um die richtigen Koordinaten für die Roboterreferenz bzw. das Werkzeug einzugeben.
Manuelle Installation
Es wird empfohlen, das automatische RUI-Installationsprogramm auszuprobieren. Wenn dieses Installationsprogramm fehlschlägt, können Sie das RoboDK-Plug-in für Rhino manuell installieren, indem Sie die folgenden Schritte ausführen:
Downloads:
1.Rhino herunterladen und installieren.
2.Laden Sie RoboDK herunter und installieren Sie es.
3.Laden Sie das RoboDK-Plugin für Rhino direkt oder von Food4Rhino herunter.
4.Entpacken Sie die Dateien.
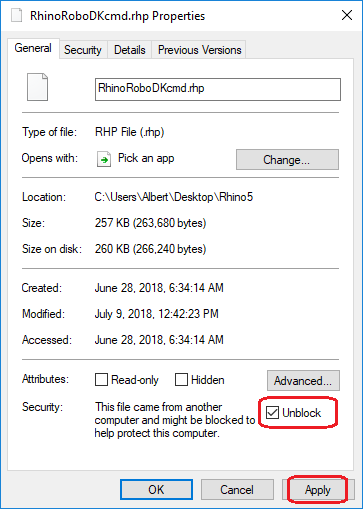
Eigenschaften entsperren:
5.Klicken Sie mit der rechten Maustaste auf die Datei RhinoRoboDKcmd.rhp und wählen Sie Eigenschaften.
6.Wählen Sie Unblock und Apply.
7.Wiederholen Sie die Schritte 5 und 6 für RhinoRoboDKgh.gha.
Laden Sie das RoboDK-Plug-in in Rhino:
8.Laden Sie das RoboDK-Plug-in für Rhino: Öffnen Sie die Datei RhinoRoboDKcmd.rhp mit Rhino.
9.Laden Sie die RoboDK-Symbolleiste für Rhino: Öffnen Sie die Datei RhinoToolbar-Add-RoboDK.rui mit Rhino.
10.Laden Sie die RoboDK Grasshopper-Komponenten: Öffnen Sie die Datei RhinoRoboDKgh.gha mit Grasshopper (öffnen Sie Grasshopper, indem Sie den Grasshopper-Befehl eingeben).
Rhino neu starten:
11.Schließen Sie Rhino und öffnen Sie es erneut, um das Grasshopper-Plug-in zu sehen.