hyperMILL Arbeitsablauf
In hyperMILL/hyperCAD-S können Sie das RoboDK-Plugin verwenden, um das Senden von Bearbeitungsaufträgen an RoboDK zu erleichtern. Damit können Sie Roboter für die Roboterbearbeitung simulieren und programmieren.
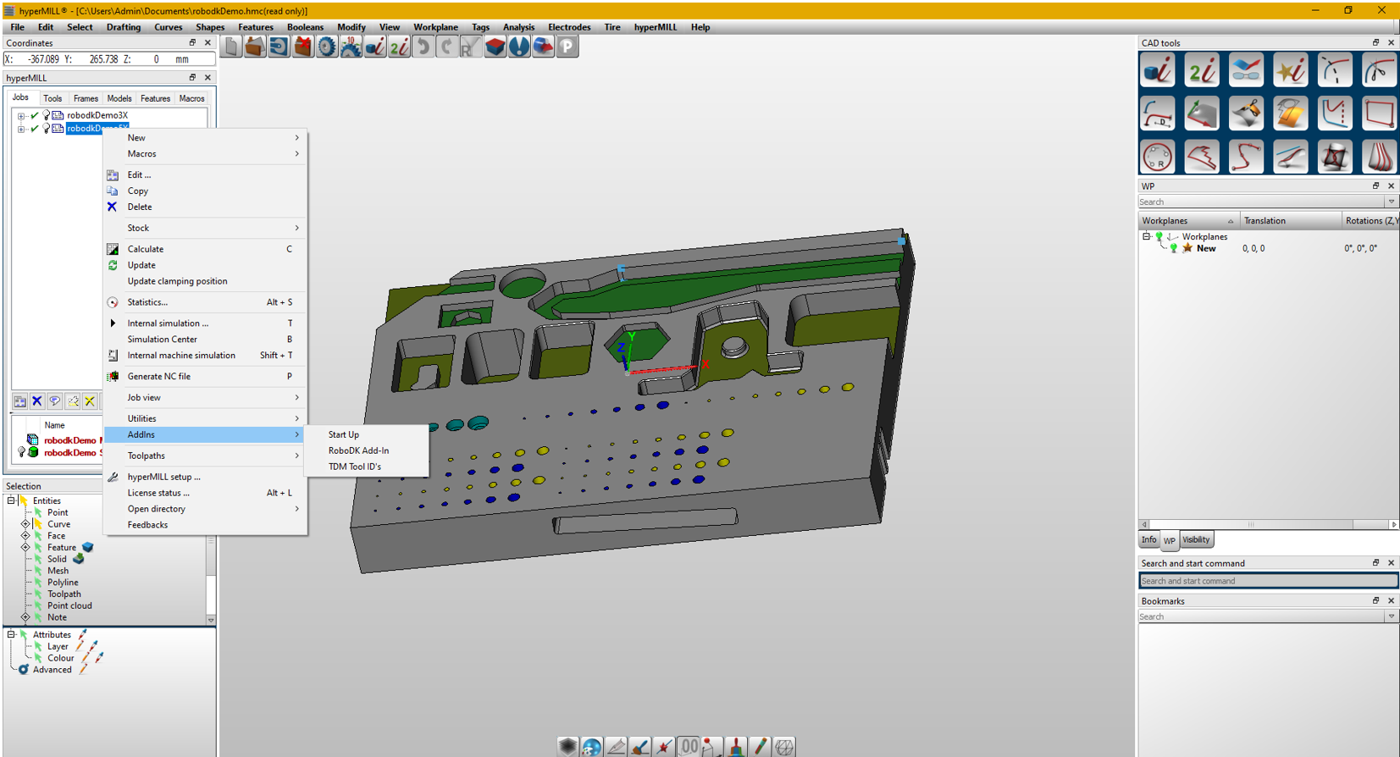
Folgen Sie diesen Schritten, um Ihr Roboterbearbeitungsprojekt automatisch aus hyperMILL/hyperCAD-S einzurichten:
1.Klicken Sie mit der rechten Maustaste auf Ihren Auftrag.
2.Wählen Sie Add-Ins.
3.Wählen Sie RoboDK Add-in.
Hinweis: Sie sollten den mitgelieferten DIN_ISO Postprozessor für 3-Achsen-Maschinen verwenden, wenn Sie Bearbeitungsaufträge an RoboDK senden. Für die additive Fertigung mit 5 Achsen sollten Sie den Postprozessor APT_R05a_E03 verwenden.
Ein grünes Häkchen wird angezeigt, wenn das Programm mit dem ausgewählten Roboter durchführbar ist. Wenn es Probleme gibt (z. B. Singularitäten, Achsenbegrenzungen oder Reichweitenprobleme), wird ein rotes Häkchen mit einem Hinweis auf das Problem angezeigt.
Doppelklicken Sie auf das Roboterbearbeitungsprojekt
Klicken Sie mit der rechten Maustaste auf ein Programm und wählen Sie Ausführen, um es zu simulieren (oder doppelklicken Sie auf das Programm). Sie können auch Roboterprogramm generieren (F6) wählen, um das Roboterprogramm zu erhalten, das in die Robotersteuerung geladen werden muss. Weitere Informationen über die Erstellung von Roboterprogrammen finden Sie im Abschnitt Offline-Programmierung.
Klicken Sie bei Bedarf mit der rechten Maustaste auf ein Programm und wählen Sie Postprozessor auswählen, um den Postprozessor zu ändern. Dieser Schritt kann Ihnen dabei helfen, das Aussehen Ihres generierten Codes anzupassen. Weitere Informationen zum Auswählen und Anpassen von Postprozessoren finden Sie im Abschnitt Postprozessoren.