hyperMILL Einführung
Mit dem RoboDK Add-in für OpenMind hyperMILL können Sie schnell Roboterbearbeitungsprojekte direkt aus hyperMILL heraus einrichten. Mit der RoboDK-Integration für OpenMind-Software können Sie die CAD/CAM-Bearbeitungssoftware hyperMILL ganz einfach mit RoboDK kombinieren, um industrielle Roboterarme für die Roboterbearbeitung zu simulieren und zu programmieren.
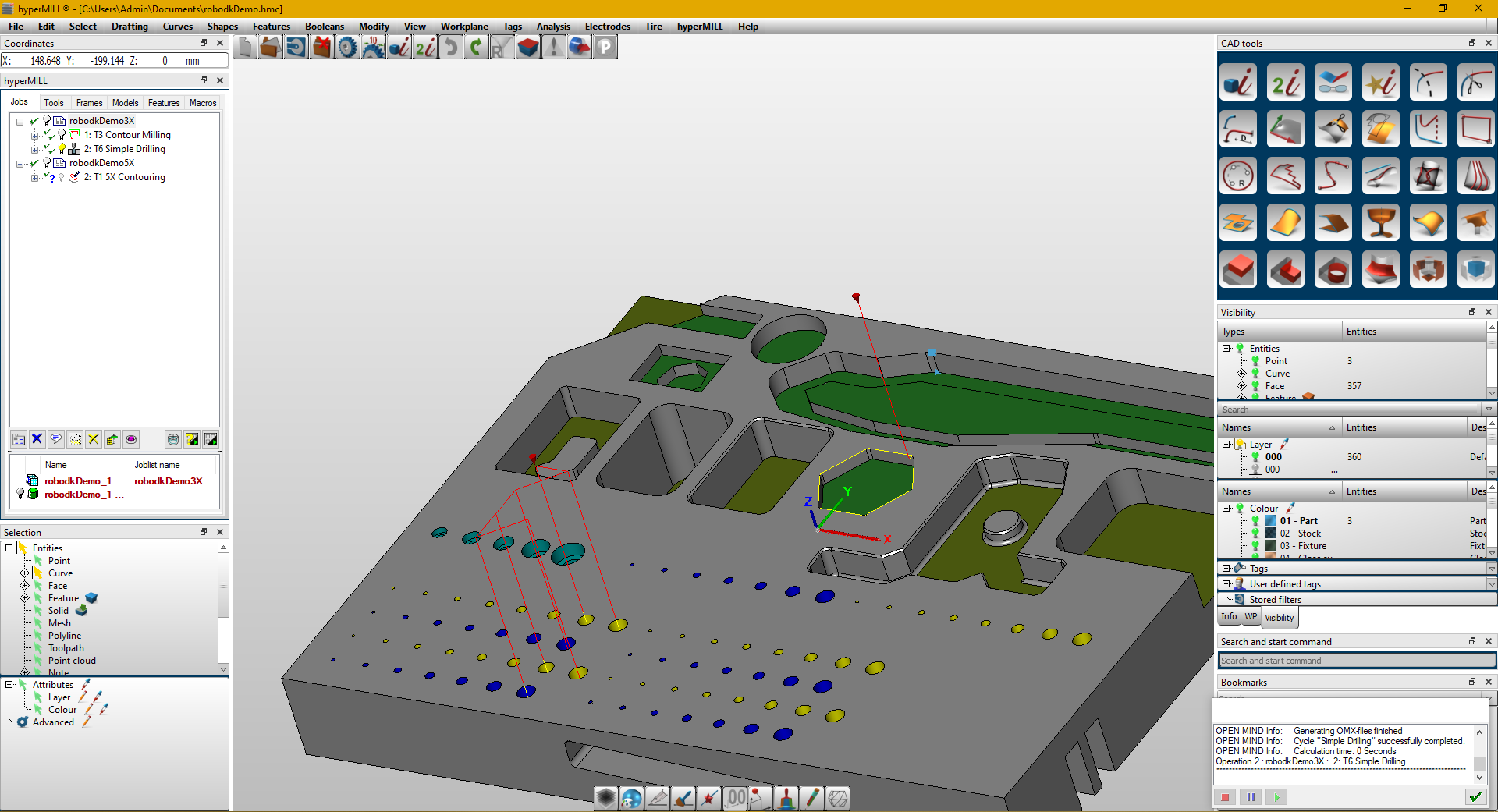
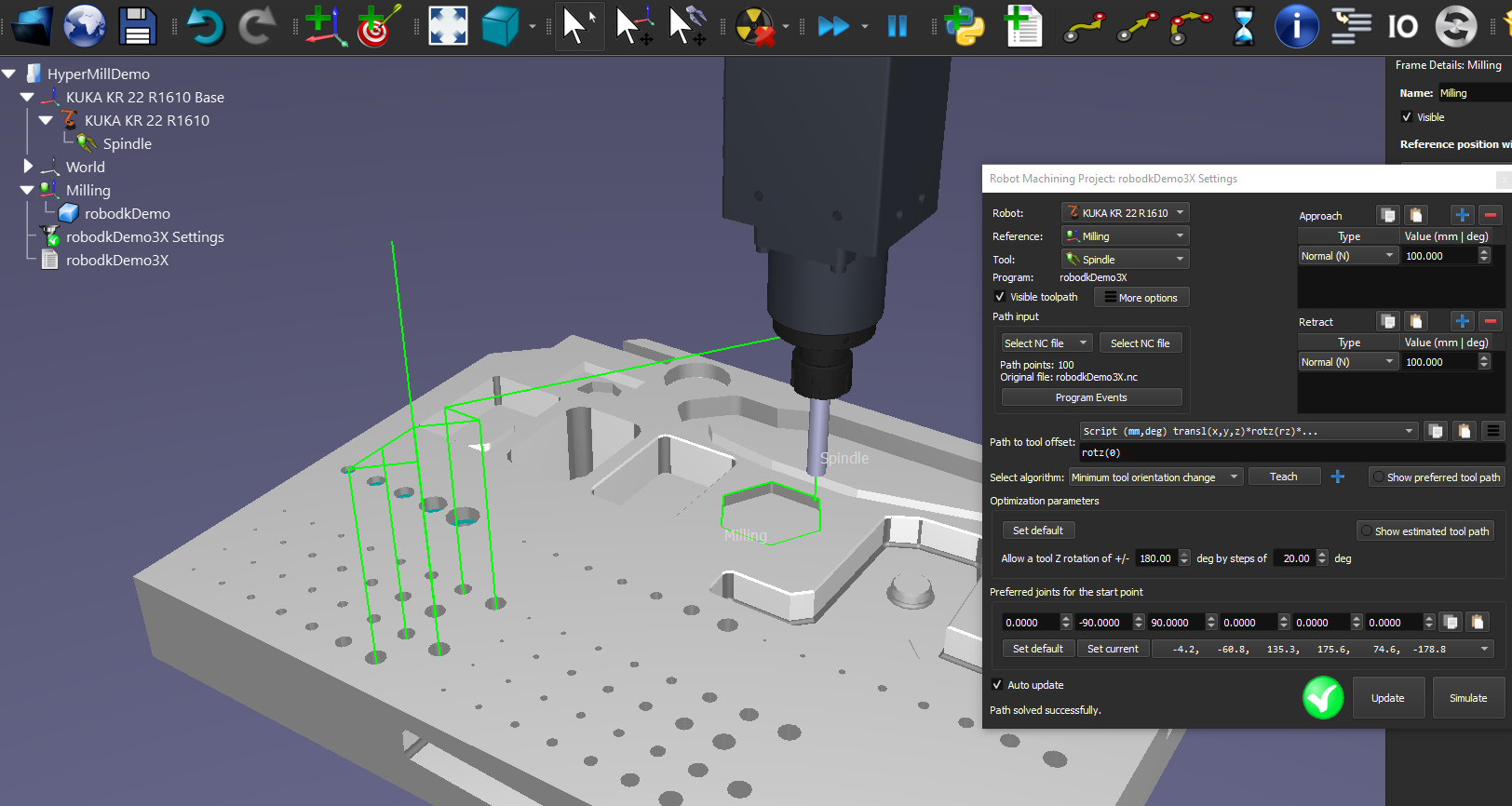
Mit diesem hyperMILL Add-in können Sie ganz einfach fehlerfreie Programme für die Roboterbearbeitung direkt aus hyperMILL erzeugen. Alternativ unterstützt RoboDK auch Standard APT CLS und G-Code Bearbeitungsdateien.
Weitere Informationen über RoboDK für die Roboterbearbeitung finden Sie im Abschnitt Roboterbearbeitung. Weitere Informationen über hyperMILL und hyperCAD-s finden Sie unter https:/www.openmind-tech.com/en.html.
Dieses Dokument beschreibt, wie Sie das RoboDK-Plugin für die hyperMILL-Software einrichten und wie Sie hyperMILL verwenden, um Roboterbearbeitungsprojekte in RoboDK einzurichten.