Beispiel einer Abänderung
In diesem Abschnitt wird gezeigt, wie Sie kleine Änderungen für einen vorhandenen Postprozessor vornehmen.
Als Beispiel werden die folgenden 3 Änderungen am bestehenden KUKA KRC4 Postprozessor vorgenommen:
●Überschreiben Sie die maximale Geschwindigkeit auf 500 mm/s. Selbst wenn der Roboter so programmiert wird, dass er sich schneller bewegt, ist die Geschwindigkeit im Postprozessor somit auf 500 mm/s begrenzt.
●Generieren Sie jedes Programm als separate Datei und beschränken Sie die Programme auf maximal 3000 Codezeilen. Große Programme werden dadurch in kleinere Programme unterteilt und nacheinander aufgerufen
Der vorherige Abschnitt zeigt, wie Sie einen vorhandenen Postprozessor zur Bearbeitung öffnen:
1.Wählen Sie Program➔Postprozessor hinzufügen/ändern
2.Wählen Sie KUKA_KRC4
3.Wählen Sie OK. Der Postprozessor wird im IDLE-Editor von Python angezeigt.
In den folgenden Abschnitten wird gezeigt, wie Sie diese Änderungen im Texteditor vornehmen.
Erzwingen eines Geschwindigkeitlimits
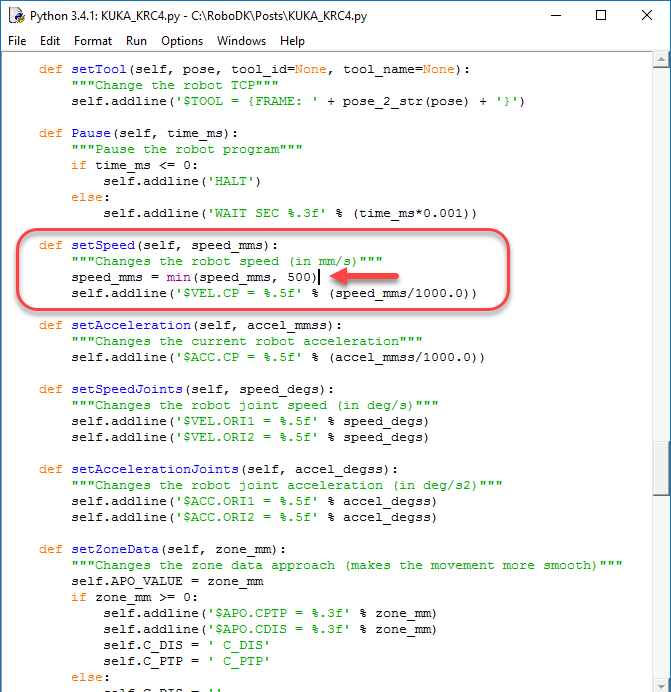
Befolgen Sie diese Schritte, um eine Geschwindigkeitsbegrenzung von 500 mm/s festzulegen und unterbinden Sie die Einstellung höherer Geschwindigkeiten in RoboDK:
1.Suchen Sie die setSpeed Funktionsdefinition (def setSpeed)
2.Fügen Sie die folgende Zeile hinzu, bevor Sie die Ausgabe $VEL.CP erzeugen, die die Geschwindigkeit in m/s ändert:
speed_mms = min(speed_mms, 500)
Erstellen eines separaten Programms pro Datei
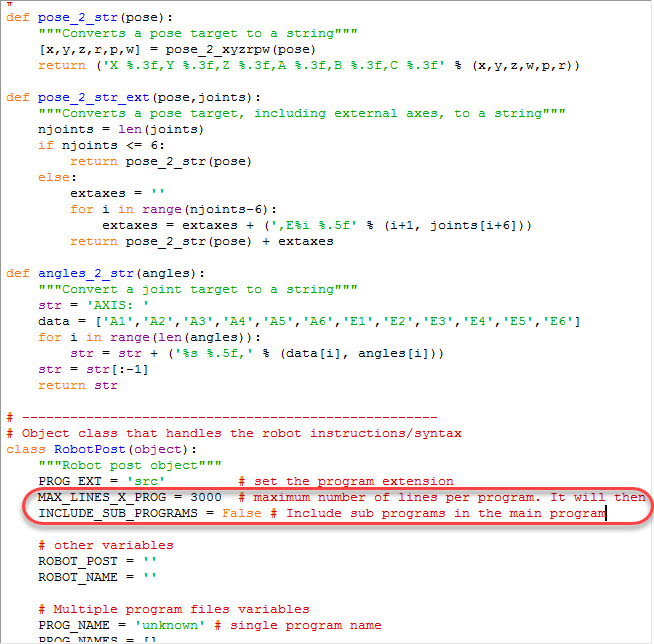
Machen Sie die folgenden Änderungen, um zu vermeiden, dass Sie mehr als ein Programm pro Datei hinzufügen und höchstens Programme mit 3000 Zeilen Code erstellen:
1.Setzen Sie die Variable MAX_LINES_X_PROG auf 3000
2.Setzen Sie die Variable INCLUDE_SUB_PROGRAMS auf False