Erzwingen eines Geschwindigkeitlimits
Befolgen Sie diese Schritte, um eine Geschwindigkeitsbegrenzung von 500 mm/s festzulegen und unterbinden Sie die Einstellung höherer Geschwindigkeiten in RoboDK:
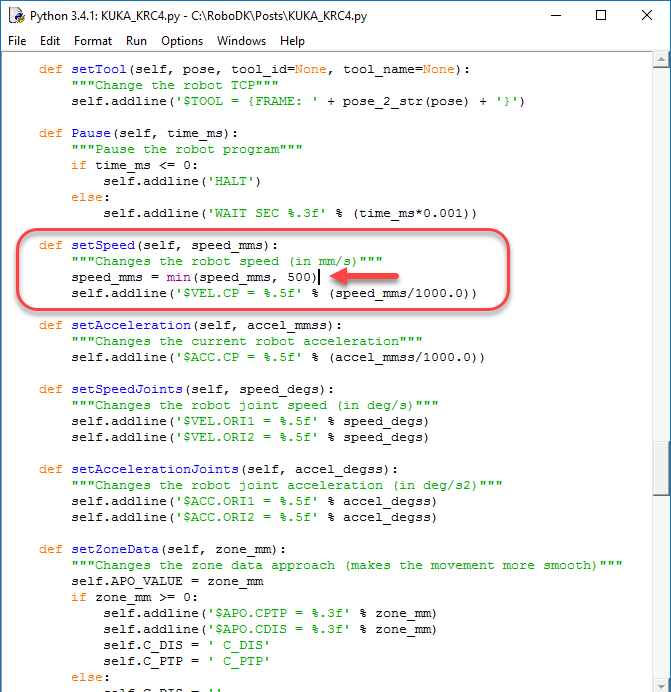
1.Suchen Sie die setSpeed Funktionsdefinition (def setSpeed)
2.Fügen Sie die folgende Zeile hinzu, bevor Sie die Ausgabe $VEL.CP erzeugen, die die Geschwindigkeit in m/s ändert:
speed_mms = min(speed_mms, 500)
Anmerkung: Eine Standardgeschwindigkeit von 200 mm/s ist in der HEADER-Variable oben im Postprozessor definiert ($ VEL.CP = 0.2). Diese Standardgeschwindigkeit kann auch geändert werden, wenn sie nicht durch RoboDK beeinflusst wird.