RoboDK RRS für Comau (Add-in)
RoboDK RRS für Comau ist ein spezielles RoboDK Add-in für Comau-Roboter. Um ein RoboDK Add-in zu installieren, lesen Sie bitte den Abschnitt Add-in in der Dokumentation.
Sobald Sie die erforderlichen RCS-Module von Comau erworben und aktiviert haben, können Sie mit der Verwendung des RoboDK RRS for Comau Add-in beginnen.
Um ein RSS-Programm zu erstellen, gehen Sie folgendermaßen vor:
1.Öffnen Sie die Einstellungen mit Programm➔ RRS für Comau➔ Einstellungen
a.Legen Sie die Roboter-ID fest. Diese ist normalerweise 0.
b.Legen Sie den Pfad zum Roboterordner fest. Dies ist normalerweise der Hauptordner, der die Dateien .c5g, .CIO und .xml enthält.
c.Legen Sie den Pfad zu der Roboterdatei fest. Dies ist die .c5g-Datei, die sich im Roboterordner befindet.
d.Legen Sie den Pfad zu der RRS-DLL-Datei fest, normalerweise rcscomau.dll.
2.Generieren Sie das RRS-Programm, indem Sie mit der rechten Maustaste auf Ihr Programm klicken➔ RRS-Programm generieren (Comau)
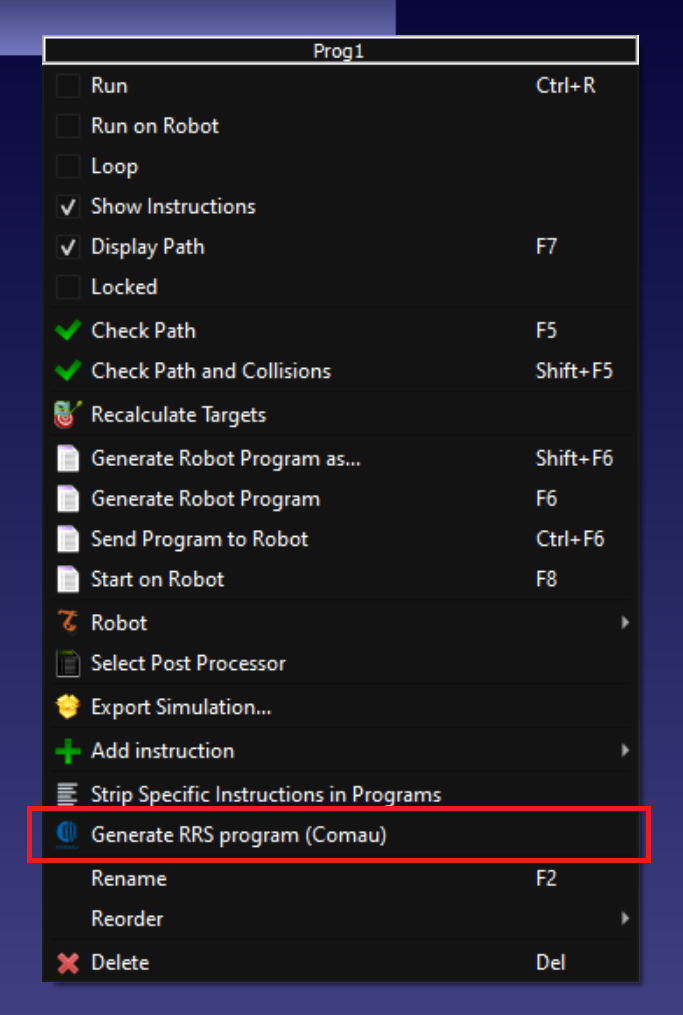
Es wird ein neues Programm mit genauen Verbindungen erstellt und die Zykluszeitschätzung wird im Programmnamen angegeben.
Hinweis: RoboDK bietet Geschwindigkeitsbefehle in mm/s und deg/s. Einige Robotersteuerungen, darunter Comau, verwenden jedoch Prozent (%). Das mit RRS geparste Eingabeprogramm sollte Prozent verwenden.