Realistische Roboter-Simulation (RRS)
Realistic Robot Simulation (RRS) ist ein Standard, der genaue Robotersimulationen und Zykluszeitschätzungen ermöglicht. Dieser RRS-Standard ermöglicht die Integration von Original-Steuerungssoftware in Simulationen und Offline-Programmiersoftware.
Die RRS Add-ins für RoboDK erweitern bestehende RoboDK-Simulationen und -Programme um genaue Roboterbahnen und Zykluszeiten. Mit diesem RRS Add-in können Sie eine direkte Schnittstelle zum Robot Controller Software (RCS) Modul eines Roboterherstellers herstellen. Bei der RCS handelt es sich im Wesentlichen um die proprietäre Bewegungsplanungssoftware des Roboterherstellers.
Mit dem RoboDK RRS Add-in können Benutzer hochpräzise Simulationen des Roboterverhaltens durchführen, indem sie innerhalb von RoboDK genaue Werkzeugwege und Zykluszeiten erzeugen.
Anforderungen
Um die RRS-Unterstützung für RoboDK zu aktivieren, müssen Sie zunächst das RCS-Modul vom Roboterhersteller erwerben. Dabei handelt es sich in der Regel um eine Bibliothek (z.B. eine dll-Datei unter Windows), die separat verkauft und aktiviert wird.
Hinweis: RoboDK stellt kein RCS-Modul eines Roboterherstellers zur Verfügung.
Wir empfehlen, das RCS-Modul des Roboterherstellers in C:\RoboDK\api\RRS\%BRAND%\ abzulegen. Der Quellpfad kann jedoch über das Add-in angegeben werden.
RoboDK RRS-Schnittstelle
RoboDK bietet eine konfigurierbare Python-Schnittstelle zur RRS-1-Implementierung von RCS eines beliebigen Roboterherstellers. Darüber hinaus bietet es die notwendigen Dienstprogramme und Basislinien für die Interaktion zwischen RoboDK und der RRS-Schnittstelle.
Obwohl die RRS-Implementierung bei verschiedenen Roboterherstellern konsistent sein sollte, kann es sein, dass die von der Schnittstelle bereitgestellte Basislinie für eine bestimmte Marke etwas angepasst werden muss. RoboDK bietet eine herstellerspezifische Implementierung der RRS-Schnittstelle.
RoboDK RRS für Comau (Add-in)
RoboDK RRS für Comau ist ein spezielles RoboDK Add-in für Comau-Roboter. Um ein RoboDK Add-in zu installieren, lesen Sie bitte den Abschnitt Add-in in der Dokumentation.
Sobald Sie die erforderlichen RCS-Module von Comau erworben und aktiviert haben, können Sie mit der Verwendung des RoboDK RRS for Comau Add-in beginnen.
Um ein RSS-Programm zu erstellen, gehen Sie folgendermaßen vor:
1.Öffnen Sie die Einstellungen mit Programm➔ RRS für Comau➔ Einstellungen
a.Legen Sie die Roboter-ID fest. Diese ist normalerweise 0.
b.Legen Sie den Pfad zum Roboterordner fest. Dies ist normalerweise der Hauptordner, der die Dateien .c5g, .CIO und .xml enthält.
c.Legen Sie den Pfad zu der Roboterdatei fest. Dies ist die .c5g-Datei, die sich im Roboterordner befindet.
d.Legen Sie den Pfad zu der RRS-DLL-Datei fest, normalerweise rcscomau.dll.
2.Generieren Sie das RRS-Programm, indem Sie mit der rechten Maustaste auf Ihr Programm klicken➔ RRS-Programm generieren (Comau)
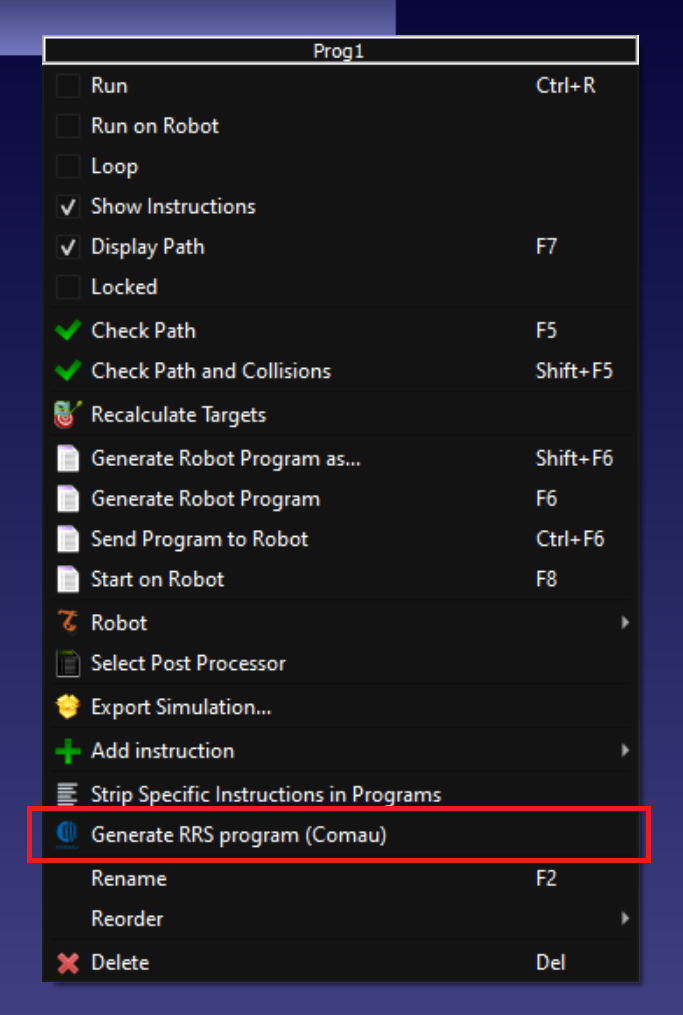
Es wird ein neues Programm mit genauen Verbindungen erstellt und die Zykluszeitschätzung wird im Programmnamen angegeben.
Hinweis: RoboDK bietet Geschwindigkeitsbefehle in mm/s und deg/s. Einige Robotersteuerungen, darunter Comau, verwenden jedoch Prozent (%). Das mit RRS geparste Eingabeprogramm sollte Prozent verwenden.