RoboDK API
C# ist eine von Microsoft entwickelte Programmiersprache, die zum Erstellen einer Vielzahl von Anwendungen entwickelt wurde, die auf dem .NET Framework ausgeführt werden. C# ist einfach, leistungsfähig, typsicher und objektorientiert.
Im Hauptteil dieses Dokuments werden die Vorteile der Verwendung der RoboDK-API mit einer weit verbreiteten Programmiersprache wie C# für die Roboterprogrammierung erläutert.
Die RoboDK-API für C # ist eine RoboDK.cs-Quelldatei, die die RoboDK-Klasse (ähnlich der Robolink -Klasse von Python), die RoboDK.Item-Klasse (ähnlich der Python-API-Klasse Robolink.Item) und andere Tools für Robotik wie eine Matrix enthält Klasse (RoboDK.Mat) für Matrixoperationen, die mit Pose-Transformationen arbeiten.
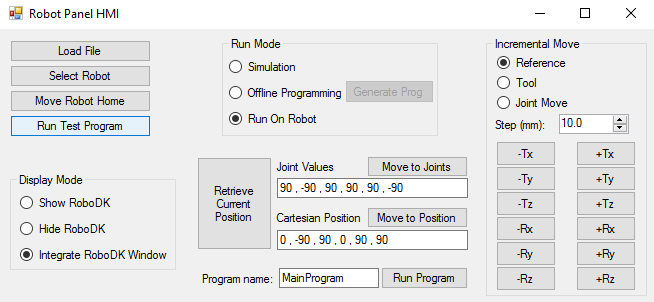
Die RoboDK-API für C# wird mit einem Beispielprojekt bereitgestellt, wie in der folgenden Abbildung gezeigt (der vollständige Quellcode ist enthalten).

Wählen Sie Datei laden, um eine RoboDK-Station oder eine andere von RoboDK unterstützte Datei zu öffnen. Wenn ein Roboter geladen ist, wird die ROBOT-Variable aktualisiert (wie bei der Verwendung von Roboter wählen).
Das folgende Video zeigt eine Übersicht des C # -Beispielprojekts mithilfe der RoboDK-API:
https://www.youtube.com/watch?v=1hRRYr9bEsY
Tip: The latest version of this C# example is available here.
C# Programme werden standardmäßig simuliert, wenn Roboterbefehle verwendet werden (z.B. MoveJ, MoveL oder setDO). Wenn das Beispiel C# Projekt gestartet wird, wird standardmäßig auch der Simulationsmodus ausgewählt.

Dies bedeutet, dass die Roboterbewegungen in RoboDK simuliert werden. Zum Beispiel können Sie den Roboter in Schritten von 10 mm bewegen, indem Sie die Schaltflächen rechts verwenden (+ Tx, -Tx, ...).
Setzen Sie Haltepunkte, um Ihre Anwendung zu debuggen und Roboterziele zu überprüfen. Roboterziele können als Achswinkel oder Mat-Variablen (4x4 -Matrizen) definiert und als XYZWPR-Format zur Fehlerbehebung von Programmproblemen untersucht werden. Weitere Informationen zu Bezugssystemen finden Sie im Abschnitt Bezugssysteme.

Es ist auch möglich, den Ausführmodus in Offline Programmierung oder Online Programmieirung (auf Roboter ausführen) zu ändern, wie in den folgenden Abschnitten gezeigt
C# Programme können offline unter Verwendung des gleichen C# Codes erzeugt werden, der zur Simulation des Roboters verwendet wurde (Offline-Programmierung). Befolgen Sie diese Schritte, um diese Funktion zu testen:
1.Wählen Sie Offline-Programmierung im Abschnitt Ausführungsmodus
2.Wählen Sie Testprogramm ausführen oder eine andere Kombination von Bewegungen
3.Wählen Sie Testprogramm ausführen oder eine andere Kombination von Bewegungen
In diesem Fall wird das Programm nicht simuliert, sondern schnell ausgeführt, um das Ergebnis zu erhalten: ein spezifisches Roboterprogramm. Der Run-Modus wird wieder in Simulation geändert, sobald das Programm generiert wurde.

C# Programme können direkt am Roboter unter Verwendung des gleichen C# Codes ausgeführt werden, der für die Simulation verwendet wird. Die Online-Programmierung ermöglicht das Ausführen eines Programms auf einer bestimmten Robotersteuerung mithilfe von Robotertreibern. Führen Sie die folgenden Schritte aus, um diese Funktion mithilfe des C# Beispielprojekts zu testen:
1.Wählen Sie auf Roboter ausführen
2.Wählen Sie Befehle aus, mit denen ein Roboter bewegt werden soll
Die Bewegungen laufen auf dem realen Roboter und der Simulator synchronisiert die Bewegungen mit dem Roboter.
RDK = Robolink();
RDK.setRunMode(RUNMODE_RUN_ROBOT);