Matlab API
Matlab ist eine Programmiersprache, die von MathWorks entwickelt wurde. MATLAB ermöglicht unter anderem Matrixmanipulationen, das Zeichnen von Funktionen und Daten sowie die Implementierung von Algorithmen.
Im Hauptteil dieses Dokuments werden die Vorteile der Verwendung der RoboDK API mit einer weit verbreiteten Programmiersprache wie Matlab für die Roboterprogrammierung erläutert.
Die RoboDK-API für Matlab ist verfügbar, nachdem RoboDK in C: / RoboDK / Matlab / installiert wurde. Die API wird als eine Menge von m Dateien bereitgestellt. Dazu gehören:
●Robolink.m ist eine Klasse, die mit RoboDK verbunden ist. Jedes Objekt in der RoboDK-Stationsstruktur kann mithilfe des Robolink-Objekts abgerufen werden. Es wird vom RobolinkItem-Objekt (wie in der RobolinkKlasse von Python) dargestellt.
●RobolinkItem.m ist eine Klasse, die ein RoboDK-Objekt im Stationsbaum darstellt. Es ist möglich, verschiedene Operationen für dieses Objekt auszuführen (identisch mit der Robolink.Item-Klasse von Python.
●transl.m, rotx.m, roty.m und rotz.m sind Funktionen, die Pose-Matrizen mit einem XYZ-Translationsvektor oder Rotationen entlang einer bestimmten Achse erzeugen.
●Pose_2_XYZRPW.m und XYZRPW_2_Pose.m ermöglichen das Konvertieren von Posen in XYZ-Position und RPW-Euler-Winkel und umgekehrt. Weitere Informationen finden Sie im Abschnitt Bezugssysteme.
Ein Beispielcode ist auf der folgenden Seite verfügbar:
https://robodk.com/Matlab-API
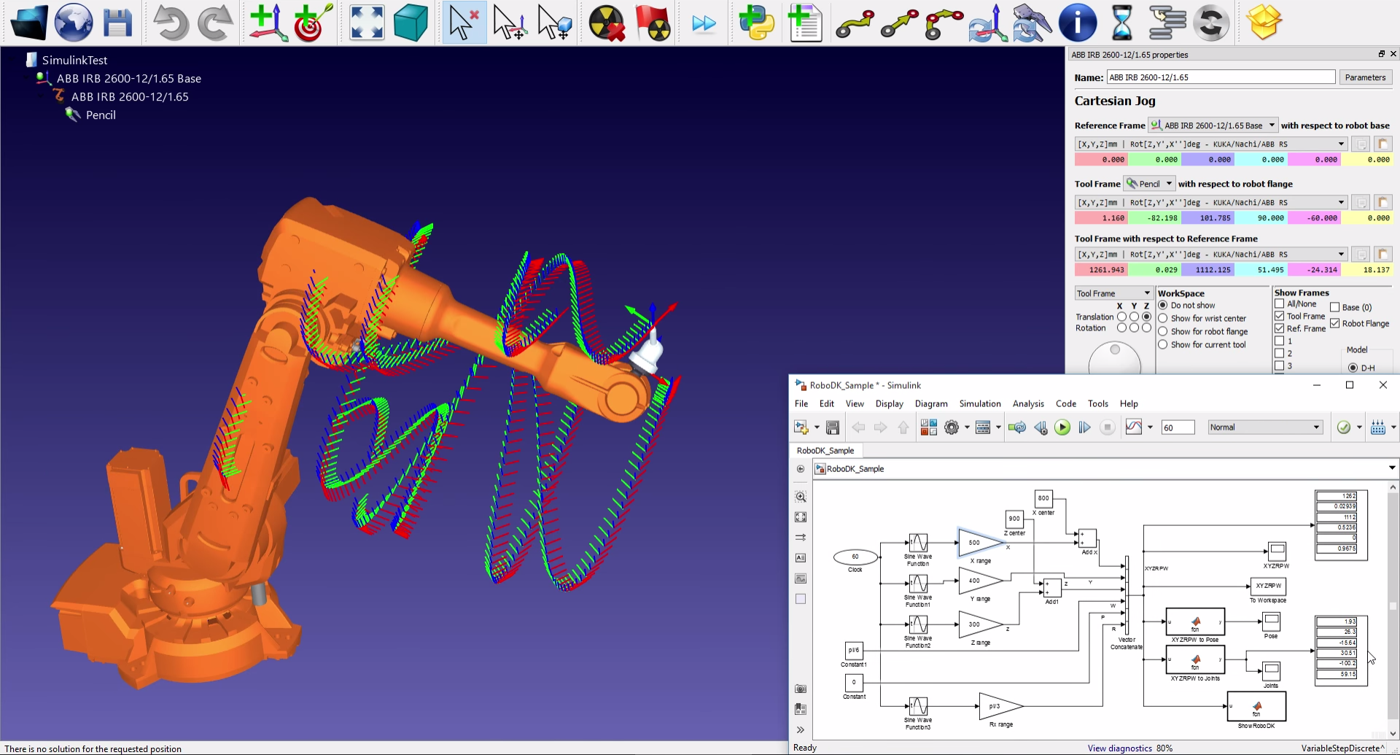
Simulink Beispiel
Ein Simulink-Projekt ist als Beispiel verfügbar. In der Simulation wird der Roboter entlang einer willkürlich erzeugten Menge von XYZ-Koordinaten bewegt.
Das folgende Video zeigt das Ergebnis der Simulation:
https://www.youtube.com/watch?v=7DDBMwa0-Oc