Python API
Pythonist eine weit verbreitete Programmiersprache, mit der Sie schneller arbeiten und Ihre Systeme effektiver integrieren können. Die Syntax von Python erlaubt es, Konzepte in weniger Codezeilen im Vergleich zu anderen Sprachen auszudrücken, wodurch sie benutzerfreundlich und einfach zu erlernen sind.
Im vorherigen Abschnitt wurde die Vorteile der Verwendung der RoboDK-API mit einer weit verbreiteten Programmiersprache für die Roboterprogrammierung wie Python erläutert.
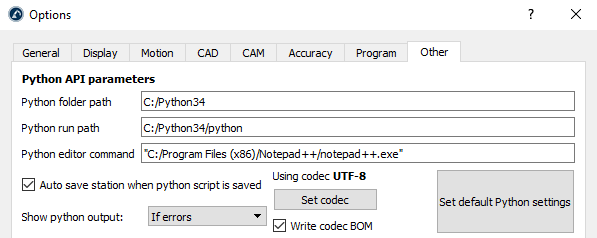
Python wird automatisch installiert und standardmäßig in RoboDK integriert. Wählen Sie Extras➔Optionen➔Anderes, um die Standardeinstellungen (Python-Speicherort und Python-Editor) zu ändern.
Die RoboDK-API für Python ist in die folgenden zwei Module unterteilt:
●Das Robolink-Modul (robolink.py): Das Robolink-Modul ist die Schnittstelle zwischen RoboDK und Python. Jedes Objekt in der RoboDK-Stationsstruktur kann mit einem Robolink-Objekt abgerufen werden und wird durch ein Element repräsentiert. Abhängig von der Robolink Objekt-Klasse können verschiedene Operationen für dieses Element ausgeführt werden.
●Das robodk-Modul (robodk.py): Das robodk-Modul ist eine Robotik-Toolbox für Python, die es ermöglicht, mit Transformationen zu arbeiten und Euler-Winkel für verschiedene Roboterhersteller zu erhalten. Alle Postprozessoren sind von diesem robodk-Modul abhängig.
Die Python-Module befinden sich im Ordner C:/RoboDK/Python/ und werden automatisch in den Python-Ordner kopiert, sobald RoboDK installiert wurde oder Standard-Python-Einstellungen festlegen ausgewählt ist (siehe vorheriges Bild).
Die folgenden Unterabschnitte zeigen, wie Sie ein einfaches Programm für Simulation, Offline-Programmierung bzw. Online-Programmierung erstellen. Weitere Beispiele finden Sie auf der Seite Python API für RoboDK. Außerdem enthält die RoboDK-Bibliothek Python-Beispielmakros im Ordner C:/RoboDK/Library/Macros/.
Python Simulation
Folgen Sie diesen Schritten, um ein Beispielprojekt mit einem UR-Roboter einzurichten und eine Bewegung mit diesem zu simulieren.
1.Wählen Sie Datei➔
2.Öffnen Sie den UR10 Roboter
3.Wählen Sie Datei➔
4.Öffnen Sie die Date Paint_gun.tool
5.Öffnen Sie anschließend das Beispiel-Python-Programm SampleOfflineProgramming.py von C:/RoboDK/Library/Macros/

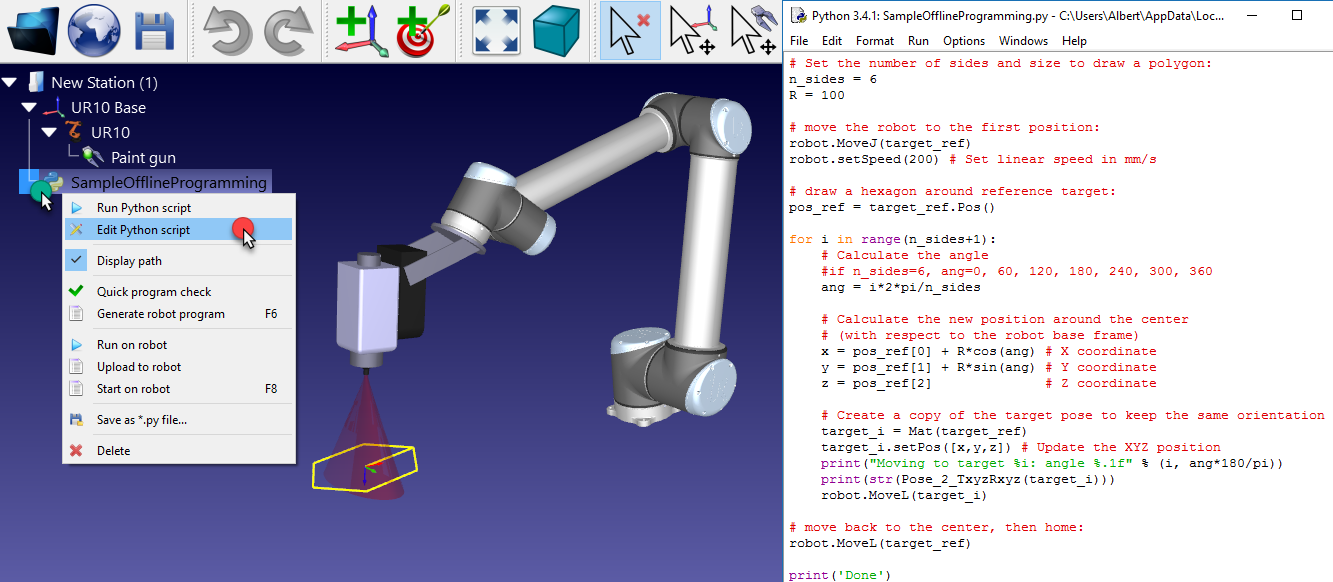
6.Doppelklicken Sie auf den Eintrag SampleOfflineProgrammierung, um die Simulation auszuführen. Der Roboter sollte ein Sechseck um den aktuellen Standort des Roboters zeichnen und die Spur des TCP wird gelb angezeigt.
Alternativ klicken Sie mit der rechten Maustaste auf das Programm und wählen Sie 
7.Klicken Sie mit der rechten Maustaste auf das Element 
Das Makro SampleOfflineProgrammierung zeichnet ein Polygon mit n_Seiten und dem Radius R an der aktuellen Position des Roboters in Bezug auf das Roboter Bezugssystem. Verschieben Sie den Roboter bei Bedarf an einen anderen Ort, ändern Sie die Polygonmaße und führen Sie das Programm erneut aus.
Dieses Beispiel ähnelt dem Programm, das im Abschnitt Offline Programmierung der Website angezeigt wird (Video enthalten).
Python OLP
Python-Programme können offline mit demselben Python-Code generiert werden, der zur Simulation des Roboters verwendet wurde (wie im vorherigen Abschnitt Python Simulation gezeigt). Offline-Programmierung ermöglicht das Generieren von Roboterprogrammen, die auf einer Robotersteuerung ausgeführt werden können:
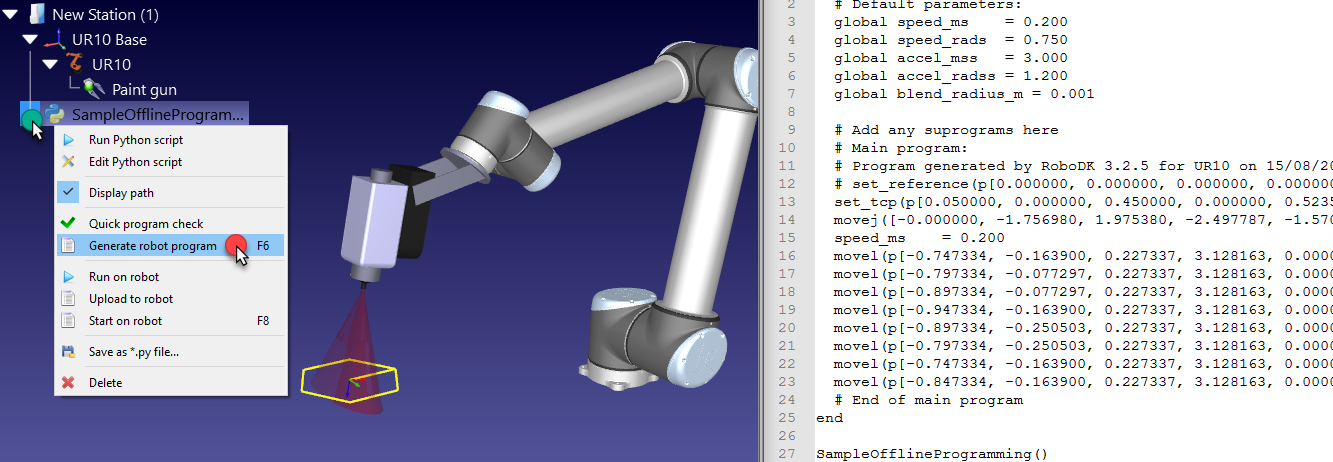
1.Klicken Sie mit der Rechtstaste auf ein
2.Wählen Sie Roboterprogramm generieren (F6)
In diesem Fall wird das Programm nicht simuliert, sondern schnell ausgeführt, um das Ergebnis zu erhalten: ein Roboterprogramm, das für eine Robotersteuerung spezifisch ist.
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)
Python Online Programmierung
Python-Programme können direkt auf dem Roboter mit dem gleichen Python-Code ausgeführt werden, der zur Simulation des Roboters verwendet wurde (bereits in der Pythonsimulation gezeigt). Die Online-Programmierung ermöglicht das Ausführen eines Programms auf einer bestimmten Robotersteuerung mithilfe von Robotertreibern:
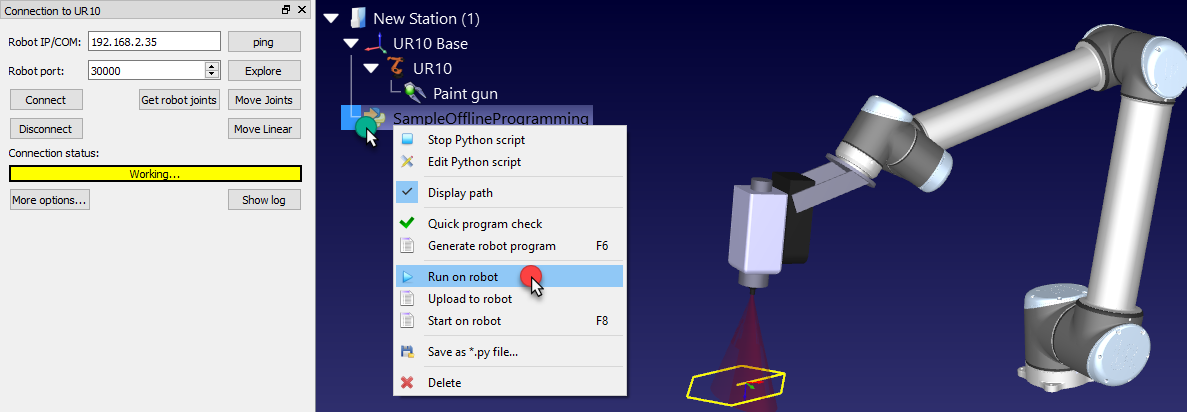
1.Klicken Sie mit der rechten Maustaste auf ein
2.Wählen Sie Auf Roboter ausführen
Das Programm wird auf dem Roboter ausgeführt, während das Python-Programm ausgeführt wird.
RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)