Python OLP
Python-Programme können offline mit demselben Python-Code generiert werden, der zur Simulation des Roboters verwendet wurde (wie im vorherigen Abschnitt Python Simulation gezeigt). Offline-Programmierung ermöglicht das Generieren von Roboterprogrammen, die auf einer Robotersteuerung ausgeführt werden können:
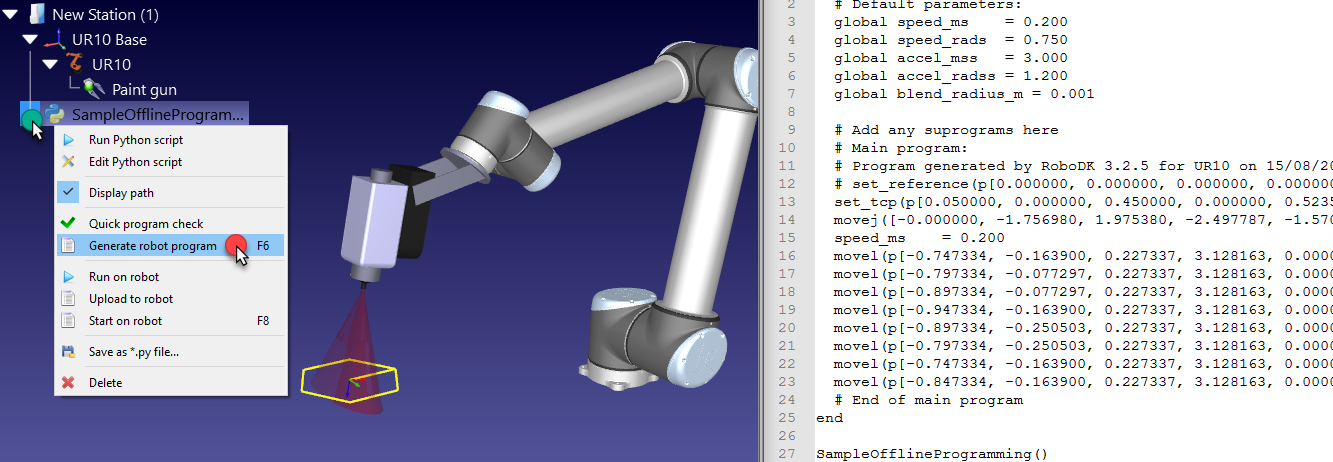
1.Klicken Sie mit der Rechtstaste auf ein 
2.Wählen Sie Roboterprogramm generieren (F6)
In diesem Fall wird das Programm nicht simuliert, sondern schnell ausgeführt, um das Ergebnis zu erhalten: ein Roboterprogramm, das für eine Robotersteuerung spezifisch ist.
Tipp: Klicken Sie mit der rechten Maustaste auf einen Roboter und wählen Sie Postprozessor auswählen, um einen anderen Postprozessor für die Offline-Programmierung zu verwenden (dies wird im Abschnitt Postprozessorgezeigt).
Anmerkung: Mit der Option Roboterprogramm generieren wird der RunModeder RDK/Robolink-Verbindung automatisch auf RUNMODE_MAKE_ROBOTPROG gesetzt. Mit anderen Worten, es ist möglich, das herstellerspezifische Programm zu generieren, anstatt es zu simulieren, wenn das Python-Programm außerhalb der RoboDK-GUI ausgeführt wird. Beispiel:
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)