Python Simulation
Folgen Sie diesen Schritten, um ein Beispielprojekt mit einem UR-Roboter einzurichten und eine Bewegung mit diesem zu simulieren.
1.Wählen Sie Datei➔
2.Öffnen Sie den UR10 Roboter
3.Wählen Sie Datei➔
4.Öffnen Sie die Date Paint_gun.tool
5.Öffnen Sie anschließend das Beispiel-Python-Programm SampleOfflineProgramming.py von C:/RoboDK/Library/Macros/

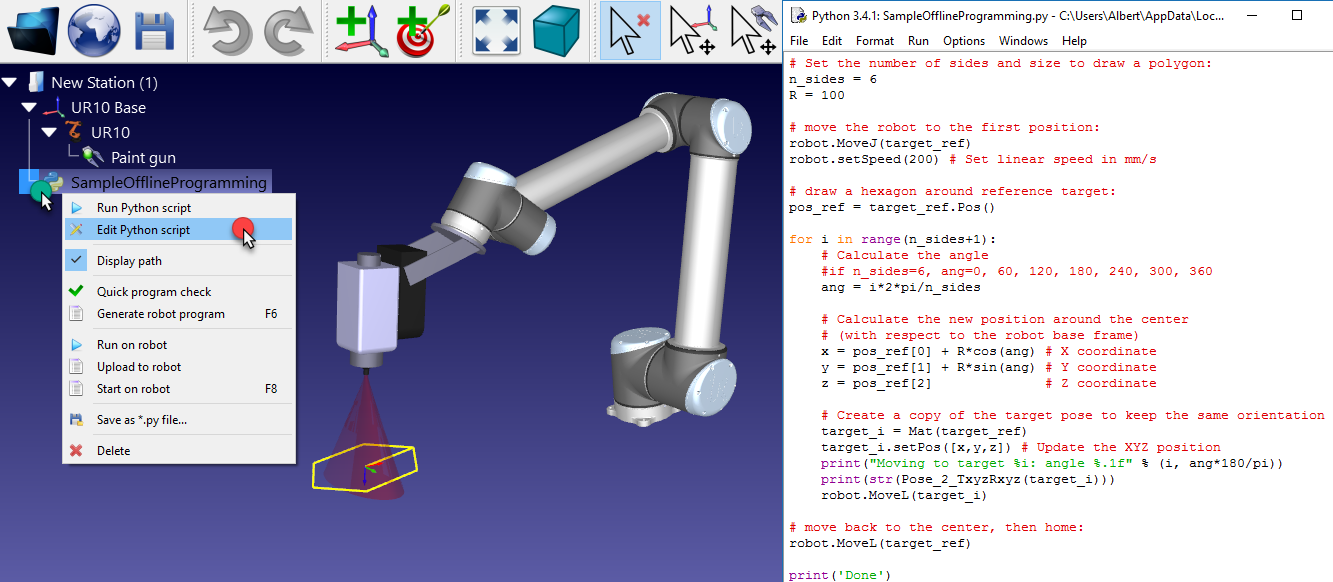
6.Doppelklicken Sie auf den Eintrag SampleOfflineProgrammierung, um die Simulation auszuführen. Der Roboter sollte ein Sechseck um den aktuellen Standort des Roboters zeichnen und die Spur des TCP wird gelb angezeigt.
Alternativ klicken Sie mit der rechten Maustaste auf das Programm und wählen Sie 
7.Klicken Sie mit der rechten Maustaste auf das Element 
Das Makro SampleOfflineProgrammierung zeichnet ein Polygon mit n_Seiten und dem Radius R an der aktuellen Position des Roboters in Bezug auf das Roboter Bezugssystem. Verschieben Sie den Roboter bei Bedarf an einen anderen Ort, ändern Sie die Polygonmaße und führen Sie das Programm erneut aus.
Dieses Beispiel ähnelt dem Programm, das im Abschnitt Offline Programmierung der Website angezeigt wird (Video enthalten).