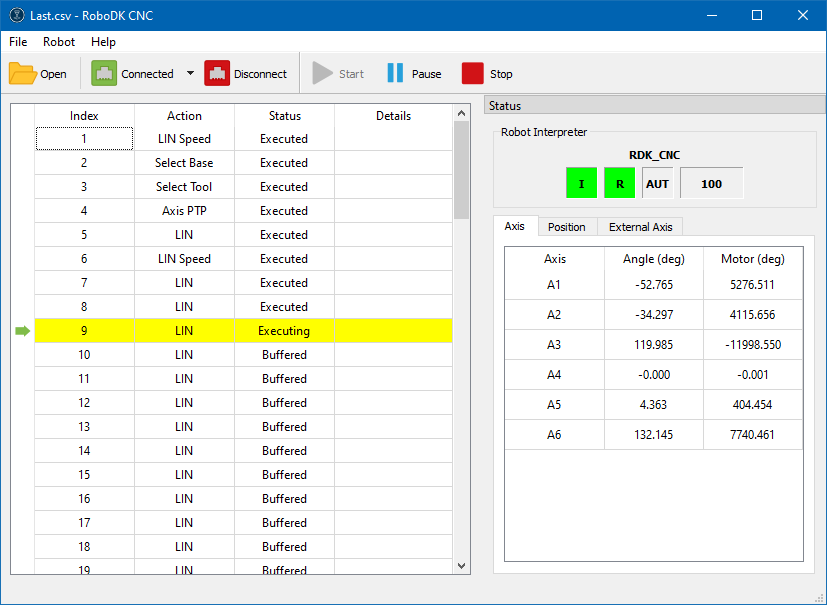
RoboDK CNC-Benutzeroberfläche
Mit RoboDK CNC können Sie große Programme in eine Robotersteuerung einspeisen.
Das Hauptfenster von RoboDK CNC enthält die folgenden Elemente:
1.Hauptmenü
2.Symbolleiste
3.Anweisungstabelle
4.Status-Panel
Die Funktionen des Hauptmenüs und der Symbolleiste überschneiden sich.
| Öffnen Sie | Öffnen Sie eine CSV-Datei, die mit dem e RoboDK CNC Postprozessor erstellt wurde. |
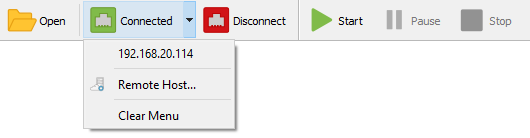
| Verbinden Sie | Dieses Symbol zeigt an, dass derzeit keine Verbindung zum Robotersteuerungssystem besteht. Wenn Sie auf diese Schaltfläche drücken, wird das Menü für den Verbindungsverlauf geöffnet. |
| Entfernter Host... | Mit dieser Aktion öffnen Sie das Dialogfeld Neue Verbindung, um eine Verbindung mit der IP-Adresse und dem Port des entfernten Robotersteuerungssystems herzustellen. |
| Verbinden Sie | Dieses Symbol zeigt an, dass versucht wird, eine Verbindung mit dem Roboter-Steuerungssystem herzustellen. |
| Verbunden | Dieses Symbol zeigt eine erfolgreiche Verbindung zur Robotersteuerung an. |
| Trennen Sie die Verbindung | Diese Aktion unterbricht sofort die Verbindung mit der Robotersteuerung. Seien Sie vorsichtig, der Roboter kann sich weiter bewegen, auch nachdem die RoboDK CNC getrennt wurde. |
| Start | Starten Sie die Bewegungen des Roboters mit der allerersten Anweisung. Oder führen Sie ein zuvor gestartetes Programm weiter aus. |
| Pause | Unterbrechen Sie die Ausführung eines zuvor gestarteten Programms. |
| Stoppen Sie | Brechen Sie die Programmausführung ab und halten Sie die Bewegungen des Roboters an. |









Das Statusfeld enthält Informationen über das aktuell laufende KRL-Programm, Bereitschafts- und Geschwindigkeitsüberschreibungsanzeigen sowie Informationen über die aktuelle Roboterposition.
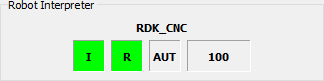
Das Bedienfeld des Roboter-Dolmetschers enthält vier Anzeigen:
Roboterantriebe und Bewegung |
| Die Antriebe des Roboters werden eingeschaltet, und der Roboter ist bereit, Bewegungen auszuführen. |
| Die Roboteraktoren sind ausgeschaltet und der Roboter ist nicht betriebsbereit. | |
Status des KRL-Programms |
| Das Roboterprogramm wird nicht geladen. |
| Das Roboterprogramm ist geladen und bereit zur Ausführung. | |
| Das Roboterprogramm wird gerade ausgeführt. | |
| Das Roboterprogramm wurde aufgrund eines Fehlers unterbrochen. | |
| Das Roboterprogramm wurde vollständig ausgeführt. | |
Roboter Controller Modus |
| Der aktuelle Betriebsmodus des Robotersteuerungssystems. Er kann die folgenden Werte annehmen: T1, T2, AUT, EXT. |
Geschwindigkeit Override |
| Der Wert für die Überschreitung der Programmausführungsgeschwindigkeit in Prozent von 0 bis 100. |








