Kalibrierung einrichten
Um das Werkzeug (TCP) mit TwinTool zu kalibrieren, müssen Sie den Roboter in RoboDK laden und sicherstellen, dass der Sensor und der Roboter verbunden sind. Optional können Sie die Zelle modellieren, indem Sie die 3D-Modelle der Objekte und Werkzeuge hinzufügen. Auf diese Weise lassen sich Kollisionen automatisch vermeiden.
1.Laden Sie den Roboter:
a.Wählen Sie Datei➔ Online-Bibliothek öffnen. Die Online-Bibliothek wird in RoboDK angezeigt.
b.Verwenden Sie die Filter, um Ihren Roboter zu finden.
c.Wählen Sie Öffnen, um den Roboter automatisch in Ihre RoboDK Station zu laden.
d.Alternativ können Sie die Roboterdatei auch direkt aus der Bibliothek herunterladen (https://robodk.com/library) und die Datei mit RoboDK öffnen (die .robot-Datei).
2.Schließen Sie den Sensor an:
a.Schließen Sie den Sensor an Ihren Computer an.
b.Wählen Sie TwinTool➔
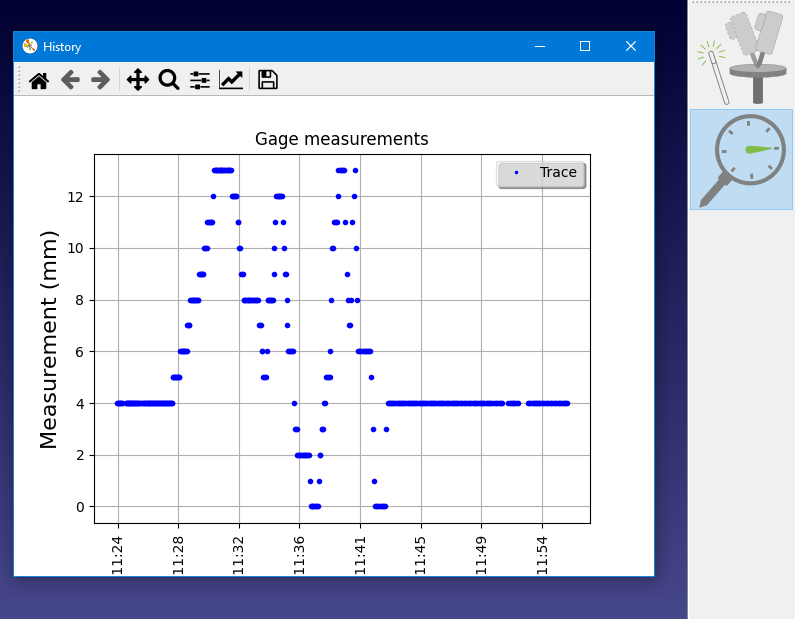
c.Stellen Sie sicher, dass der Sensor misst und die Messungen stabil sind.
Hinweis: Wenn Sie nicht sofort eine Verbindung zum Sensor herstellen können, können Sie die Verbindungseinstellungen in den nächsten Schritten bearbeiten und zur späteren Verwendung speichern.
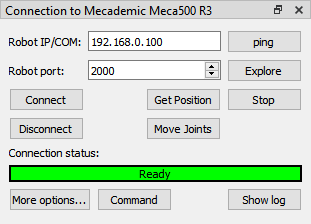
3.Schließen Sie den Roboter an:
a.Wählen Sie Verbinden➔ Roboter verbinden.
b.Geben Sie die Roboter-IP und den Port ein.
c.Wählen Sie Verbinden.
Hinweis: Einige Robotersteuerungen erfordern eine bestimmte Einrichtung oder bestimmte Softwareoptionen. Weitere Informationen finden Sie im Abschnitt Robotertreiber.
4.Wählen Sie Position abrufen aus dem Roboter-Verbindungsfenster. Mit diesem Schritt wird die Position des Roboters in RoboDK aktualisiert.
Kundenspezifische Einrichtung
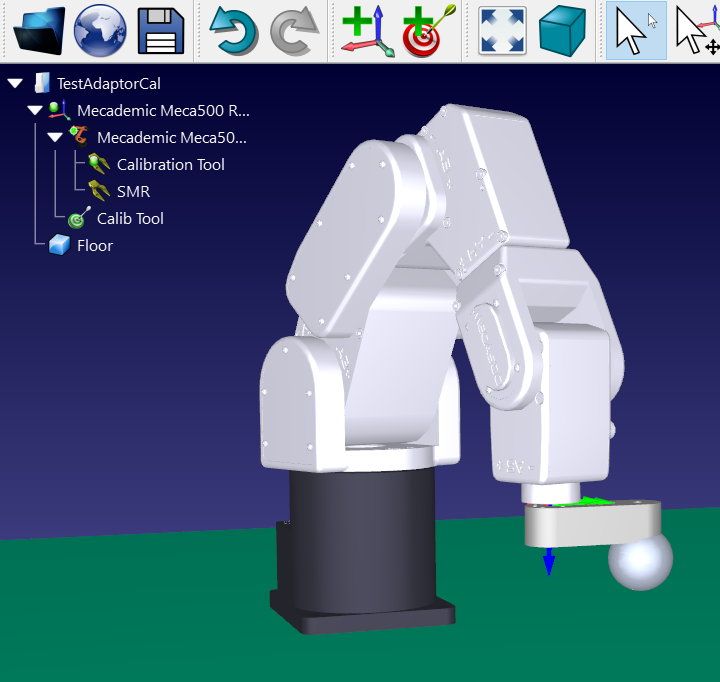
Sie können optional diese Schritte ausführen, um die 3D-Umgebung Ihrer Zelle richtig zu modellieren.
1.Laden Sie das 3D-Modell Ihres Werkzeugs und erstellen Sie ein Werkzeug in RoboDK. Weitere Informationen finden Sie im Abschnitt Werkzeug erstellen.
2.Laden Sie beliebige 3D-Dateien, um die Zelle zu modellieren. Sie können 3D STEP, IGES, STL Dateien laden. Weitere Informationen finden Sie im Abschnitt Erste Schritte.
Hinweis: Es wird dringend empfohlen, die Zelle richtig zu modellieren, um Kollisionen zu vermeiden.
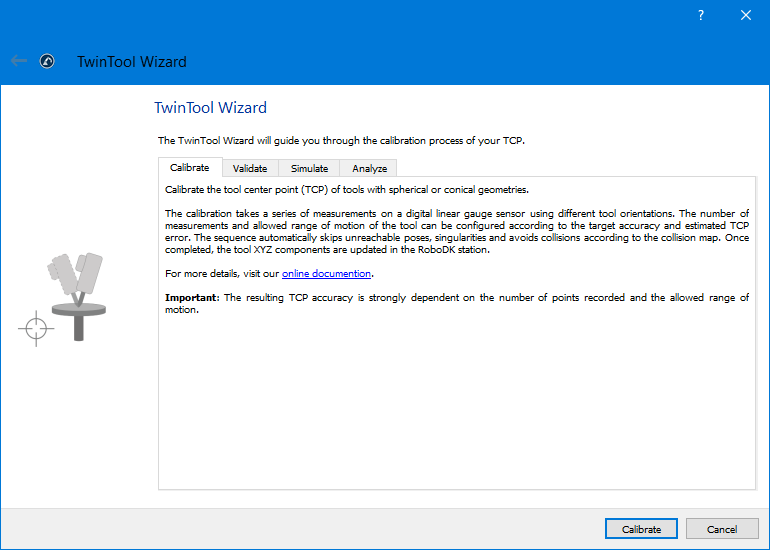
Kalibrierungs-Assistent
Um den Kalibrierungsvorgang zu starten, wählen Sie einfach TwinTool➔
Nach dem Start des Assistenten werden Sie durch die Einstellungen von