Kalibrierungs-Assistent
Um den Kalibrierungsvorgang zu starten, wählen Sie einfach TwinTool➔
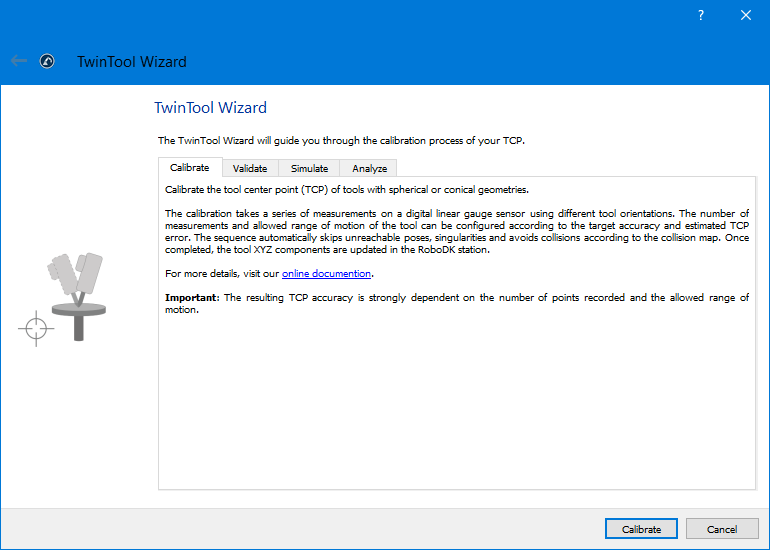
Nach dem Start des Assistenten werden Sie durch die Einstellungen von


Wichtig: Es wird empfohlen, die Kalibrierungssequenz mindestens einmal im Simulationsmodus auszuführen, bevor Sie die Kalibrierung am angeschlossenen Roboter vornehmen.
Wichtig: Die simulierte Sequenz stimmt möglicherweise nicht mit der für die Kalibrierung oder Validierung verwendeten realen Sequenz überein. Der Roboterpfad wird automatisch angepasst.
Tipp: Speichern Sie das gemeinsame Ziel der Roboterposition auf dem Sensor unter einem anderen Namen als 'Kalibrierungsziel'. Sie können es wiederverwenden, um den Roboter schnell wieder in Position zu bringen.
Tipp: Setzen Sie den geschätzten Werkzeugfehler auf 5 mm oder weniger, wenn Sie bereits eine gute TCP-Schätzung haben. Dadurch wird der Kalibrierungsvorgang beschleunigt.
Tipp: Ändern Sie den Gelenkbereich in Z und XY, um den Bewegungsbereich des Roboters zu ändern.