Kalibrierungsergebnisse
Nachdem die Kalibrierungssequenz abgeschlossen ist, werden Sie zur Registerkarte
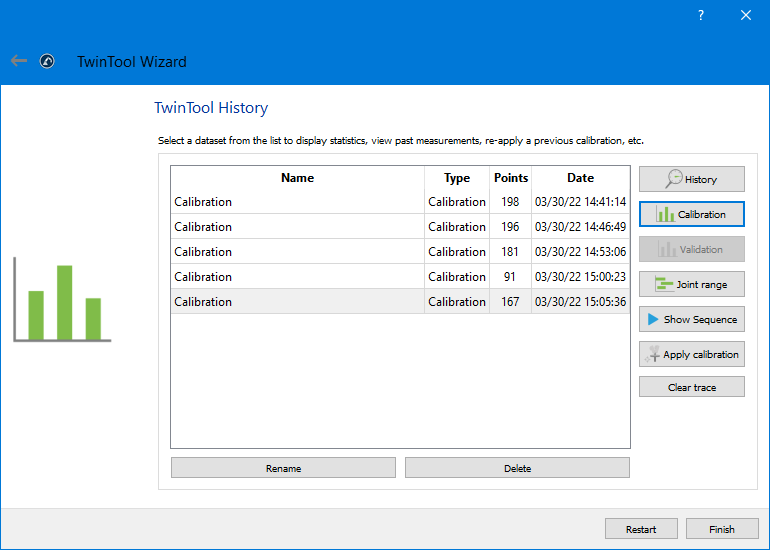
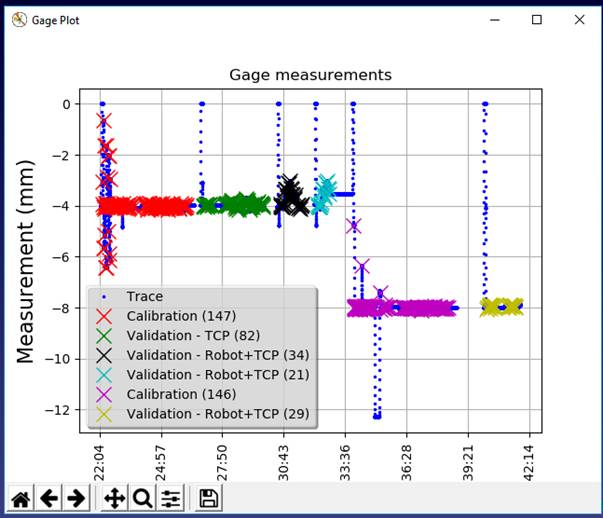
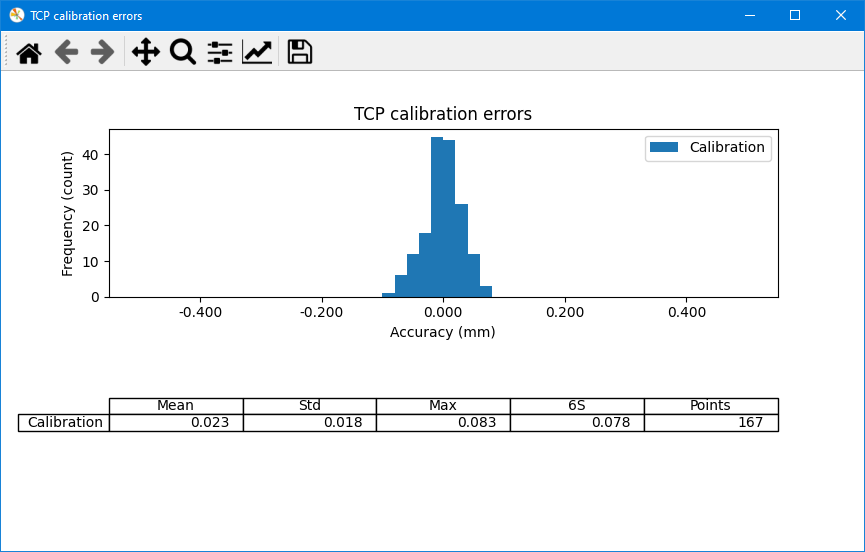
Wenn Sie auf die Schaltfläche Kalibrierung klicken, wird ein Diagramm mit den Kalibrierungsergebnissen angezeigt. Der Werkzeugmittelpunkt (TCP) wird anhand der nominalen Roboterkinematik berechnet.
Hinweis: Wählen Sie TwinTool➔
Tipp: Wenn Sie die besten Genauigkeitsergebnisse erzielen möchten, ist es wichtig, das Werkzeug mit verschiedenen Roboterkonfigurationen zu kalibrieren. Wenn Sie z.B. zuerst eine Kalibrierungssequenz mit dem Roboter in Flip-Position (Gelenk 5 negativ) ausführen, können Sie ein neues Ziel mit einer Nicht-Flip-Position (Gelenk 5 positiv) einlernen und die Kalibrierungssequenz erneut ausführen.