Kundenspezifische Einrichtung
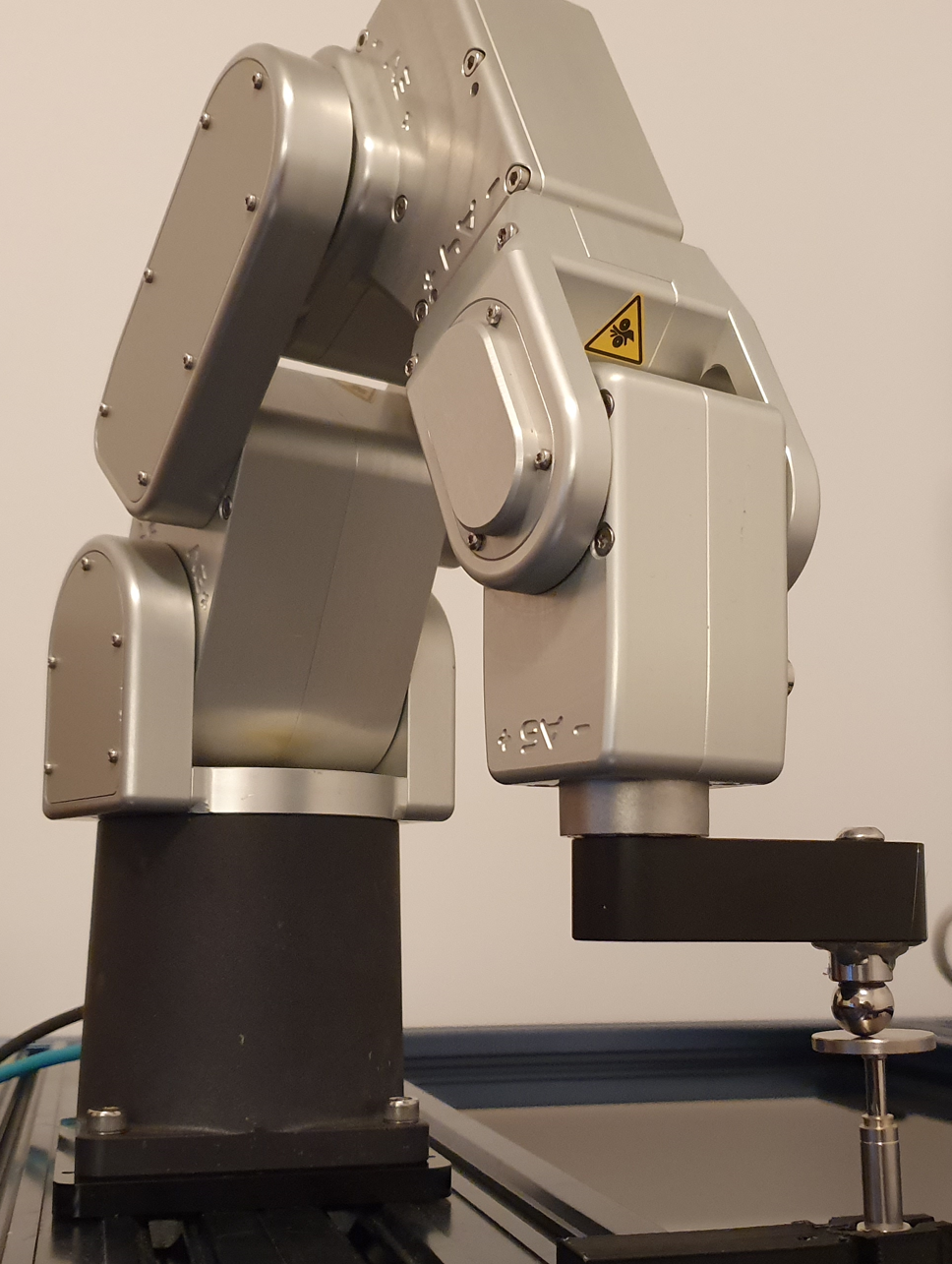
Wichtig: Es wird empfohlen, alle Objekte, die Kollisionen mit dem Roboter oder dem Werkzeug verursachen können, in 3D zu modellieren. Wenn Sie ein Werkzeug haben, das Kollisionen mit dem Roboter verursachen kann (oder andere potenzielle Kollisionen), ist es besser, mit einer angepassten Einrichtung fortzufahren, wie im nächsten Abschnitt beschrieben.
Sie können optional diese Schritte ausführen, um die 3D-Umgebung Ihrer Zelle richtig zu modellieren.
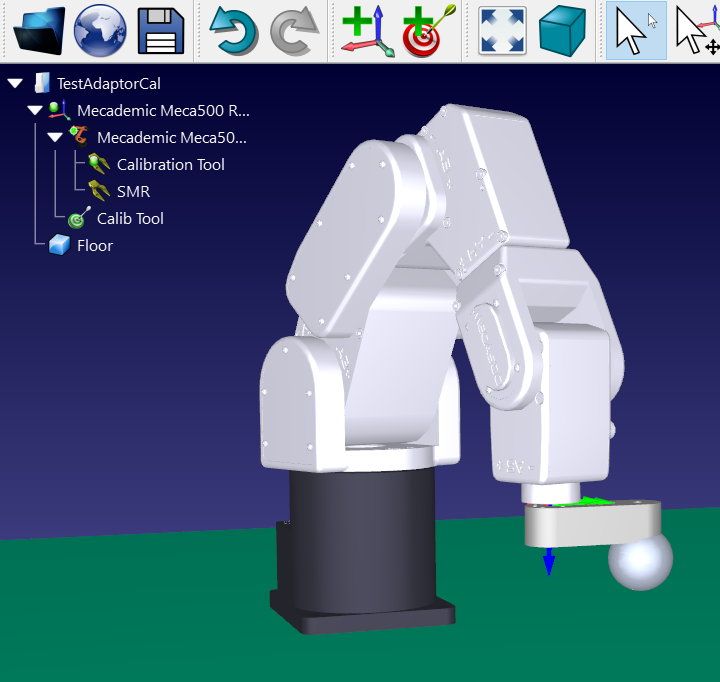
1.Laden Sie das 3D-Modell Ihres Werkzeugs und erstellen Sie ein Werkzeug in RoboDK. Weitere Informationen finden Sie im Abschnitt Werkzeug erstellen.
2.Laden Sie beliebige 3D-Dateien, um die Zelle zu modellieren. Sie können 3D STEP, IGES, STL Dateien laden. Weitere Informationen finden Sie im Abschnitt Erste Schritte.
Hinweis: Es wird dringend empfohlen, die Zelle richtig zu modellieren, um Kollisionen zu vermeiden.
Tipp: Wenn Sie eine gute Schätzung des Werkzeugmittelpunkts haben, können Sie ihn in RoboDK einrichten und das geschätzte Werkzeug aktualisieren, um den Kalibrierungsvorgang zu beschleunigen.