Validieren Sie die Werkzeugkalibrierung
Wählen Sie im Assistenten

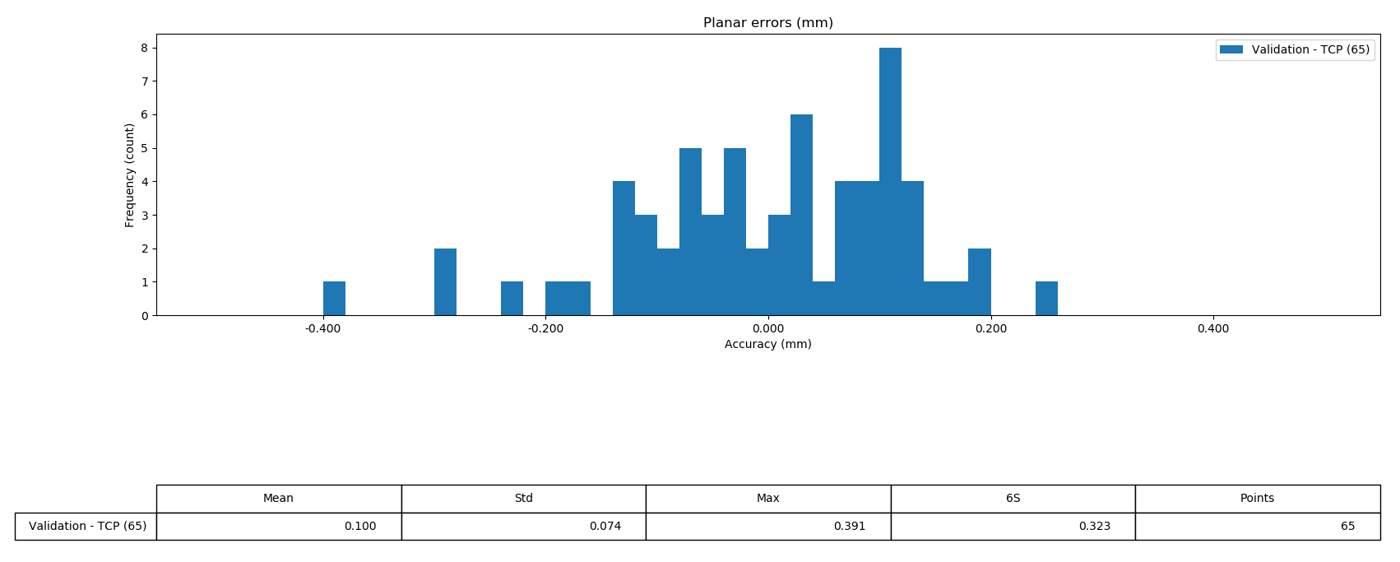
Wählen Sie Validierung, um eine Zusammenfassung und einige Statistiken über die Ergebnisse anzuzeigen. Diese Statistiken entsprechen den vom Sensor erkannten Planaritätsfehlern.
Tipp: Wenn Sie mehr Messungen für die Kalibrierung vornehmen, können Sie die Kalibrierungsergebnisse deutlich verbessern. Sie können die Messung des Sensorziels ändern (verwenden Sie z. B. ein 8-mm-Ziel nach dem Standardziel von 4 mm für eine zweite Kalibrierung). Sie können auch die Roboterkonfiguration ändern, um Messungen am gleichen Punkt, aber mit unterschiedlichen Gelenkwinkeln vorzunehmen (z.B. mit der Flip- und Non-Flip-Konfiguration).