Validierung
Sobald Sie die Kalibrierungssequenz ausgeführt haben, können Sie einige Validierungstests durchführen. Diese Validierungstests können am selben Ort des Sensors oder an verschiedenen Orten durchgeführt werden.
Wichtig: Es ist nicht möglich, mehrere Kalibrierungssequenzen zu kombinieren, die an verschiedenen Stellen des Linearmessgeräts durchgeführt wurden. Sie können den Roboter mehr als einmal an derselben Stelle kalibrieren und alle Daten, die an derselben Stelle des Sensors gesammelt wurden, werden für die Kalibrierung verwendet.
Validieren Sie die Werkzeugkalibrierung
Wählen Sie im Assistenten

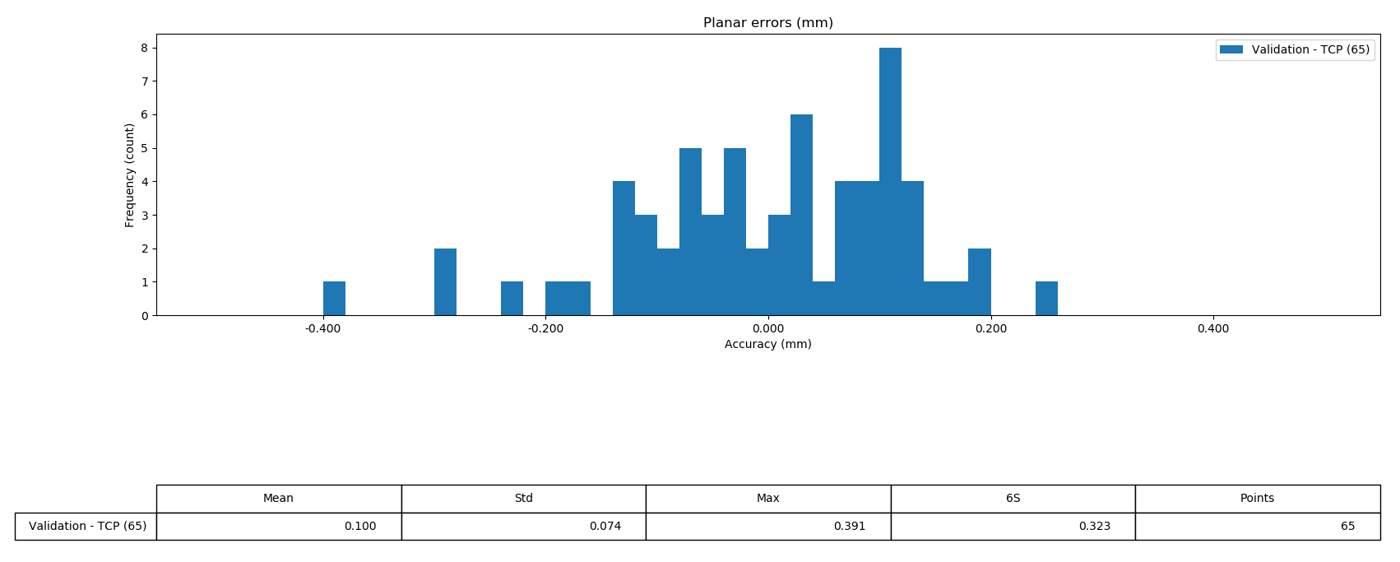
Wählen Sie Validierung, um eine Zusammenfassung und einige Statistiken über die Ergebnisse anzuzeigen. Diese Statistiken entsprechen den vom Sensor erkannten Planaritätsfehlern.
Tipp: Wenn Sie mehr Messungen für die Kalibrierung vornehmen, können Sie die Kalibrierungsergebnisse deutlich verbessern. Sie können die Messung des Sensorziels ändern (verwenden Sie z. B. ein 8-mm-Ziel nach dem Standardziel von 4 mm für eine zweite Kalibrierung). Sie können auch die Roboterkonfiguration ändern, um Messungen am gleichen Punkt, aber mit unterschiedlichen Gelenkwinkeln vorzunehmen (z.B. mit der Flip- und Non-Flip-Konfiguration).