Bezugssystem Kalibrierung
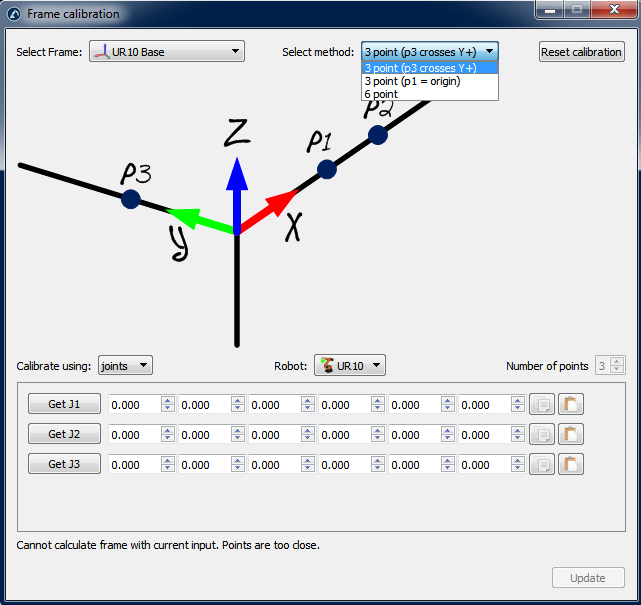
Wählen Sie Dienstprogramme➔Bezugssystem kalibrieren, um ein Bezugssystem zu kalibrieren. Es ist möglich. In dem Beispiel ist ein Bezugssystem durch drei Punkte definiert: Punkt 1 und 2 definieren die X-Achsenrichtung und Punkt 3 definiert die positive Y-Achse.
Wichtig:Es wird empfohlen, achsspezifische Ziele zu verwenden und die Genauigkeit des Roboters zu kalibrieren, bevor man Bezugssysteme kalibriert. Die Genauigkeit des Roboterarms hilft dabei, das Bezugssystem besser zu definieren.
Anmerkung:Weitere Informationen zur Kalibrierung des Bezugssystems finden Sie Abschnitt Tipps.