Ergebnisse
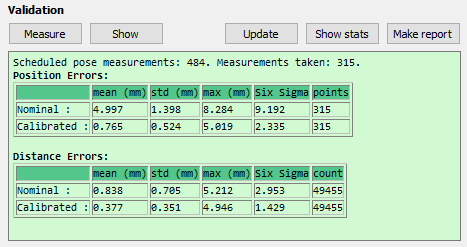
Sobald die Kalibrierung abgeschlossen ist, können Sie die Verbesserung der Genauigkeit mit den Statistiken von RoboDK analysieren. Um diese Statistik anzuzeigen, öffnen Sie das Fenster zur Roboterkalibrierung (Doppelklick auf das Symbol Roboterkalibrierung). Das Zusammenfassungsfenster im Validierungsabschnitt zeigt die Fehler vor der Kalibrierung (Nominalkinematik) und nach der Kalibrierung (kalibrierte Kinematik) an. Zwei Tabellen werden zur Verfügung gestellt, eine zeigt Statistiken über Positionsfehler und die andere zeigt Entfernungsfehler:
●Positionsfehler: Der Positionsfehler ist die Genauigkeit, mit der der Roboter einen Punkt in Bezug auf ein Bezugssystem erreichen kann.
●Entfernungsfehler: Der Entfernungsfehler wird durch Messen des Abstandsfehlers von Paaren von Punkten erhalten. Der Abstand zwischen zwei vom Roboter angefahren Punkten (erhalten mit Hilfe der kalibrierten Kinematik) wird mit der Entfernung verglichen, die das Messsystem (physikalisch gemessen) ausgibt. Alle Kombinationen werden dabei berücksichtigt. Wenn Sie 315 Messungen vornehmen, haben Sie 315x315 / 2 = 49455 Werte für Entfernungsfehler.
Die bereitgestellten Statistiken sind der mittlere Fehler, die Standardabweichung (Std) und der maximale Fehler. Es wird auch der Mittelwert plus das Dreifache der Standardabweichung angegeben, was dem erwarteten Fehler für 99,98% aller Messungen entspricht (wenn Sie berücksichtigen, dass Fehler einer Normalverteilung folgen).
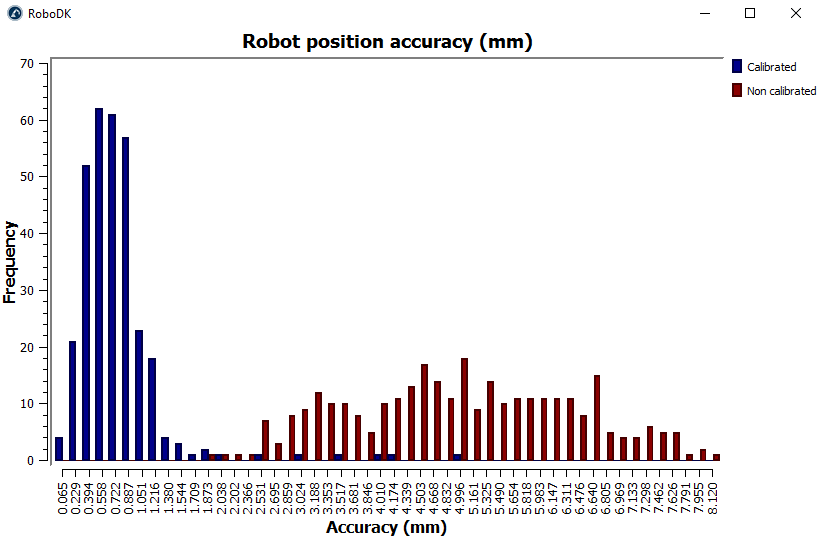
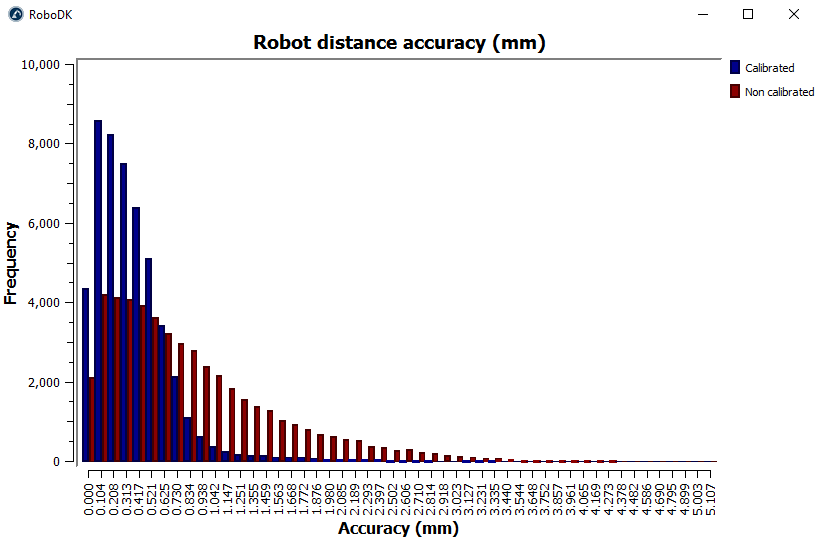
Wählen Sie Statistiken Anzeigen und zwei Histogramme zeigen die Verteilung der Fehler vor und nach der Kalibrierung an, ein Histogramm für die Positionsgenauigkeit und das andere für die Entfernungsgenauigkeit. Die folgenden Bilder entsprechen den 315 Validierungsmessungen in diesem Beispiel.
Schließlich können Sie Bericht erstellen verwenden und einen PDF-Bericht mit den in diesem Abschnitt vorgestellten Informationen erstellen.