Mit dem Tracker verbinden
Die IP des Laser Tracker wird benötigt, um die Kommunikation mit RoboDK herzustellen. Stellen Sie sicher, dass VXelements nicht ausgeführt wird und folgen Sie diesen Schritten um eine Verbindung mit dem Tracker herzustellen:
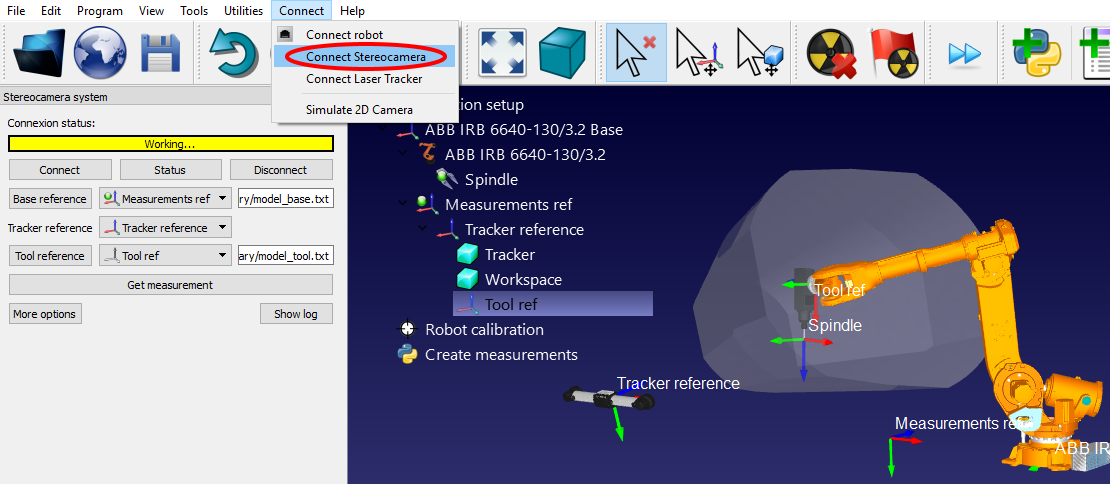
a.Wählen Sie das Menü “Verbinden➔Stereokamera verbinden”. Ein neues Fenster sollte sich öffnen.
b.Geben Sie das Basismodell und das Werkzeugmodell als Textdatei an (in dem vorherigen Abschnitt erstellt). These are the position of the targets that define the reference frame and the tool frame respectively.
c.Klicken Sie auf die Schaltfläche "Verbinden“.
d.Wenn das Verbinden erfolgrich ist, müssen Sie die Basis- und Werkzeugmodelle als Textdatei (.txt) zur Verfügung stellen.
Sie werden sehen, dass eine integrierte Version von VXelements startet. Nach ein paar Sekunden sollten Sie bei erfolgreicher Verbindung eine grüne Nachricht sehen, die "Ready" anzeigt. Die VXelements Fenster können geschlossen werden und die Verbindung bleibt aktiv. Wenn die Verbindung nicht erfolgreich ist, müssen Sie sicherstellen, dass keine VXelements-Prozesse hinter den Kulissen in der Windows-Taskleiste oder dem Task-Manager ausgeführt werden (wählen Sie STRG + ALT + ENTF, um den Prozess "VXelementsApiImplementation" zu erzwingen), und wählen Sie dann Connect in RoboDK, um es noch einmal zu versuchen