Roboter Mastering
Sobald der Roboter kalibriert wurde, benötigen Sie RoboDK, um Programme zu filtern. Daher ist eine RoboDK-Lizenz erforderlich (eine Basis-OLP-Lizenz reicht aus, um nach der Kalibrierung des Roboters genaue Roboterprogramme zu generieren). Das Filtern eines Programms bedeutet, dass die Ziele in einem Programm geändert/optimiert werden, um die Genauigkeit des Roboters unter Berücksichtigung aller Kalibrierungsparameter (ungefähr 30 Parameter) zu verbessern.
Alternativ können Sie nur die Versätze der Gelenke sowie die Basis- und Werkzeugbezugssysteme kalibrieren (4 Gelenkversatzparameter plus 6 Parameter für den Grundrahmen plus 6 Parameter für das Werkzeug Bezugssystem). Die Kalibrierung ist nicht so genau wie bei der Standardkalibrierung, aber die Eingabe bestimmter Parameter in der Robotersteuerung ist möglich und es besteht keine Abhängigkeit von RoboDK zur Erstellung von Roboterprogrammen.
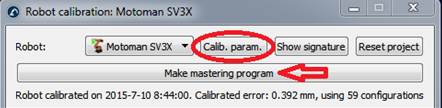
Um die Kalibrierung nur für die Gelenkoffsets zu erhalten, müssen Sie die Schaltfläche Param. Kalib. Auswählen und anschließend die Schaltfläche Mastering (im Menü "Roboterkalibrierung").

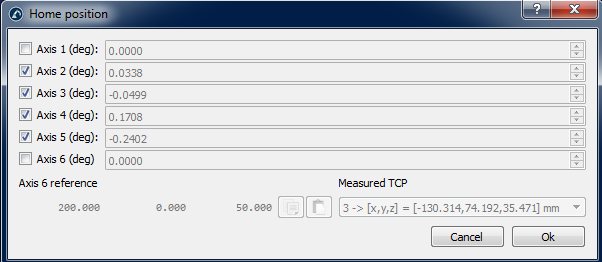
Ein neues Fenster wird erscheinen, nachdem Sie Mastering-Programm erstellen gewählt haben. In diesem Fenster können Sie auswählen, für welche Achsen Sie die neue Ausgangsposition erstellen möchten.
Die Schaltfläche Mastering-Programm erstellen erscheint im Robotik-Kalibrierungsfenster. Wählen Sie diese Schaltfläche, um ein Programm zu generieren, das den Roboter an die neue Ausgangsposition bringt. Übertragen Sie es zum Roboter und führen Sie es aus, dann muss die neue Ausgangsposition aufgezeichnet werden.
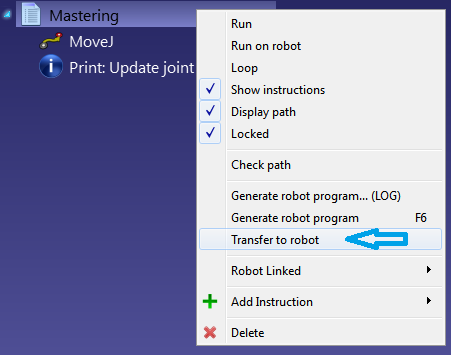
Wenn der Roboter und der PC verbunden sind, können Sie mit der rechten Maustaste auf das Programm klicken und Programm an Roboter senden auswählen, um das Programm automatisch an den Roboter zu senden. Andernfalls können Sie Roboterprogramm erstellen auswählen, um neue gemeinsame Werte für die Ausgangsposition zu sehen.