Verbindung mit dem Roboter
Die IP des Roboters (oder die COM-Port-Nummer für RS232-Verbindungen) wird benötigt, um die Kommunikation mit RoboDK richtig einzustellen. Befolgen Sie diese Schritte, um die Kommunikation mit dem Roboter zu überprüfen:
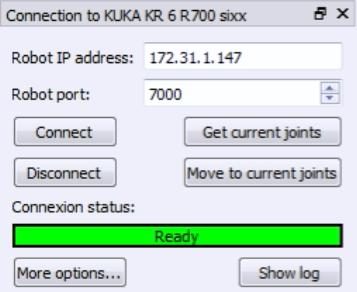
1.Wählen Sie Verbinden➔Roboter verbinden. Ein neues Fenster wird erscheinen.
2.Stellen Sie die IP und den Port des Roboters ein (oder den COM-Port, wenn die Verbindung über RS232 erfolgt).
3.Klicken Sie auf die Schaltfläche Verbinden.
4.Falls irgendwelche Probleme auftreten, lesen Sie den Anhang.
Wenn die Verbindung erfolgreich ist, sollten Sie eine grüne Nachricht sehen, die Bereit anzeigt. Die Position des virtuellen Roboters sollte exakt mit der Position des realen Roboters übereinstimmen, wenn Sie die aktuellen Achswinkel auslesen. Wählen Sie alternativ zur aktuellen Position bewegen, um den Roboter an die aktuelle Position im Simulator zu bewegen. Das Fenster kann geschlossen werden und die Verbindung bleibt aktiv.