Werkzeug Kalibrierung
Wählen Sie Dienstprogramme➔Werkzeug kalibrieren, um den TCP mit RoboDK zu kalibrieren. Sie können so viele Punkte wie gewünscht verwenden und unterschiedliche Orientierungen verwenden. Mehrere Punkte und größere Orientierungsänderungen sind besser, da Sie eine bessere Schätzung des TCP sowie eine gute Schätzung des TCP-Fehlers erhalten.
Die folgenden zwei Optionen sind zum Kalibrieren eines TCP verfügbar:
●Durch Berühren eines stationären Punktes mit dem TCP mit unterschiedlichen Orientierungen.
●Durch Berühren einer Ebene mit dem TCP (wie ein Touch-Probe).
Es wird empfohlen, die Kalibrierung durch Berühren einer Ebene durchzuführen, wenn ein Messtaster oder eine Spindel kalibriert werden soll. Diese Methode ist nicht so anfällig gegen Benutzerfehler.
Wenn der TCP sphärisch ist, wird der Mittelpunkt der Kugel als der neue TCP berechnet (es ist nicht notwendig, den Kugeldurchmesser bereitzustellen).
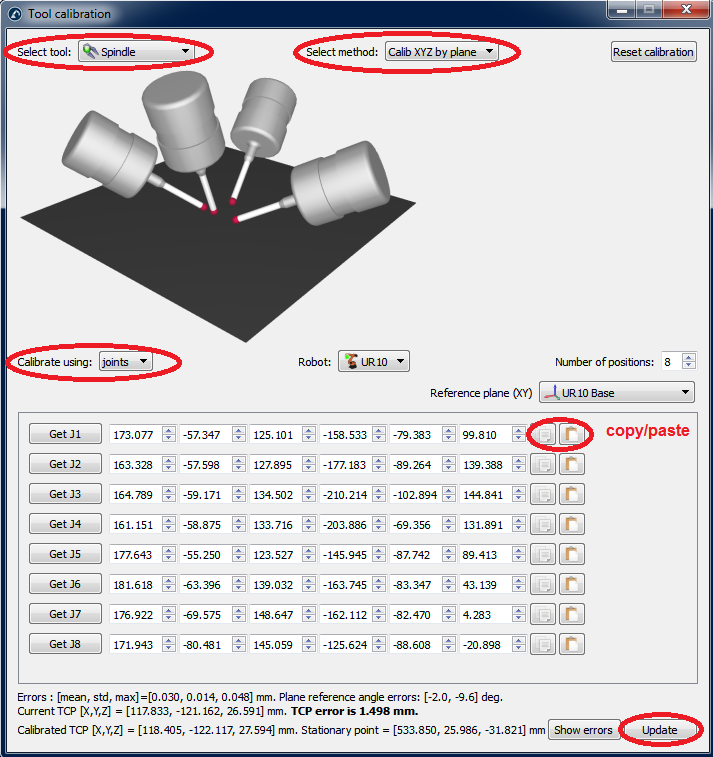
Die folgenden Schritte müssen befolgt werden, um den TCP mit einer Ebene (wie im Bild zu sehen) zu kalibrieren):
1.Wählen Sie das Werkzeug aus, das kalibriert werden soll.
2.Wählen Sie die Kalibrierungsmethode➔XYZ mit Ebene kalibrieren.
3.Wählen Sie mit Achswinkeln kalibrieren.
4.Wählen Sie den Roboter aus, der verwendet.
5.Wählen Sie die Anzahl der Konfigurationen, die Sie für die TCP-Kalibrierung verwenden möchten (es wird empfohlen, 8 Konfigurationen oder mehr zu verwenden).
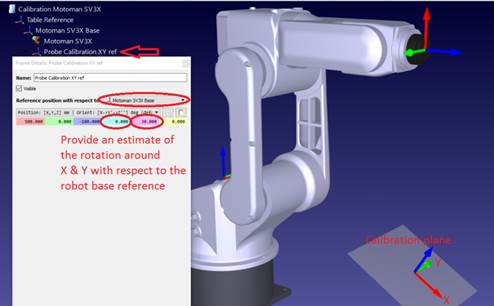
6.Geben Sie die Referenzebene ungefähr an. Wenn die Referenzebene nicht parallel zur Roboter-XY-Ebene (des Roboter Bezugssystem) ist, müssen Sie eine Schätzung dieser Referenzebene innerhalb von ± 20 Grad hinzufügen. Die Position dieser Ebene ist nicht wichtig, lediglich die Ausrichtung spielt eine Rolle.
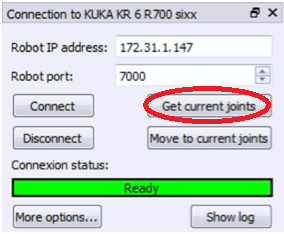
7.Sie können damit beginnen, die Tabelle mit den Achswinkeln zu füllen. Dies kann manuell oder durch Kopieren / Einfügen mit den Schaltflächen (wie im Bild gezeigt) geschehen. Sie können auch den Knopf "Get Jx" benutzen, um die aktuellen Achswinkel vom Roboter im Simulator zu erhalten. Wenn Sie die Achswinkel von einem realen Roboter erhalten, der mit dem Roboter verbunden ist, müssen Sie zuerst "Aktuelle Verbindungen" aus dem Roboterverbindungsmenü auswählen (siehe Bild oder Anhang für weitere Informationen über das Verbinden eines Roboters mit RoboDK). Es wird dringend empfohlen, eine separate Kopie der für die Kalibrierung verwendeten Verbindungen zu speichern (z. B. eine Textdatei).
8.Sobald die Tabelle gefüllt ist, sehen Sie die neuen TCP-Werte (X, Y, Z) als "kalibrierten TCP" am Ende des Fensters. Sie können "aktualisieren" auswählen und der neue TCP wird in der RoboDK-Station aktualisiert. Die Ausrichtung der Sonde kann mit dieser Methode nicht gefunden werden.
9.Sie können "Fehler anzeigen" auswählen und es werden die Fehler jeder Konfiguration in Bezug auf den berechneten TCP ausgegeben. Zudem können Konfigurationen gelöscht werden, wenn sie einen größeren Fehler aufweisen als die anderen.
10.Sie müssen die Werte in der realen Robotersteuerung manuell aktualisieren (nur X, Y, Z). Wenn der TCP in einem von RoboDK generierten Programm verwendet wird, müssen die Werte in der Robotersteuerung nicht aktualisiert werden.