Robot Calibration (Laser Tracker)
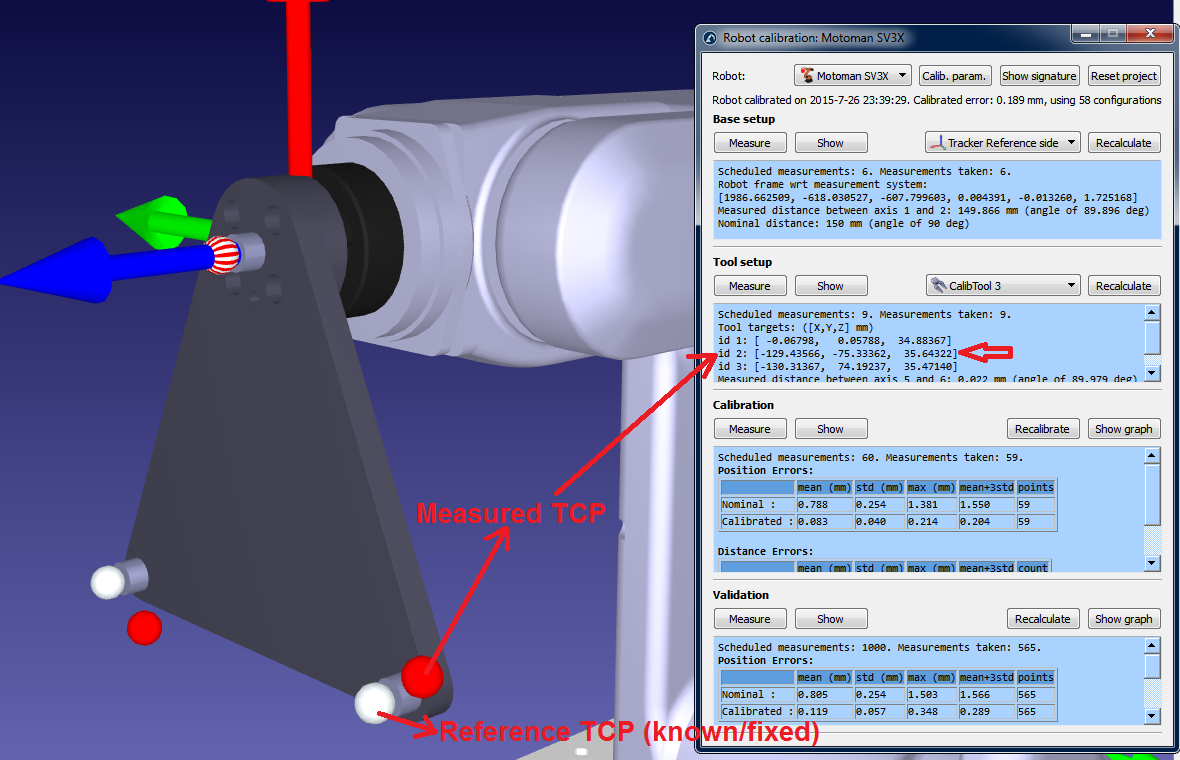
Sie müssen ein Referenzziel verwenden, um die "Home" -Position von Achse 6 richtig einzustellen. Der Winkelversatz ist die Drehung um die Z-Achse des Werkzeugflansches. Dieser wird benötigt, um den gemessenen TCP (X, Y, Z) mit der bekannten TCP-Referenz. Der gemessene TCP (siehe folgendes Bild) ist einer der TCPs, der im zweiten Schritt des Kalibrierungsverfahrens gemessen wurden. Der Referenz-TCP ist eine bekannte Referenz, die einem der TCP für das verwendete Kalibrierungswerkzeug entspricht.
Idealerweise muss der Referenz-TCP vom CMM in Bezug auf den Werkzeugflansch gemessen werden (eine Kopie des Roboterwerkzeugflansches wäre am besten). Alternativ können Sie einen neuen Roboter verwenden, um den TCP erstmalig zu messen (Schritt zwei des Kalibrierungsverfahrens) und einen gemessenen TCP als Referenz zu verwenden. Es ist wichtig, einen Passstift und/oder eine entsprechende Werkzeugflanschreferenzierung zu verwenden, um sicherzustellen, dass sich der Endeffektor immer an der gleichen Position befindet.