Measuring the base
Diese Messungen können überall im Werkzeugflansch durchgeführt werden, wenn das gleiche Ziel für alle 6 Messungen gemessen wird. Um die Messungen zu starten, wählen Sie Messen im Abschnitt Grundeinstellungen. Das folgende Fenster wird geöffnet. Wählen Sie dann Messung starten und der Roboter bewegt sich sequenziell durch die geplanten Messungen.
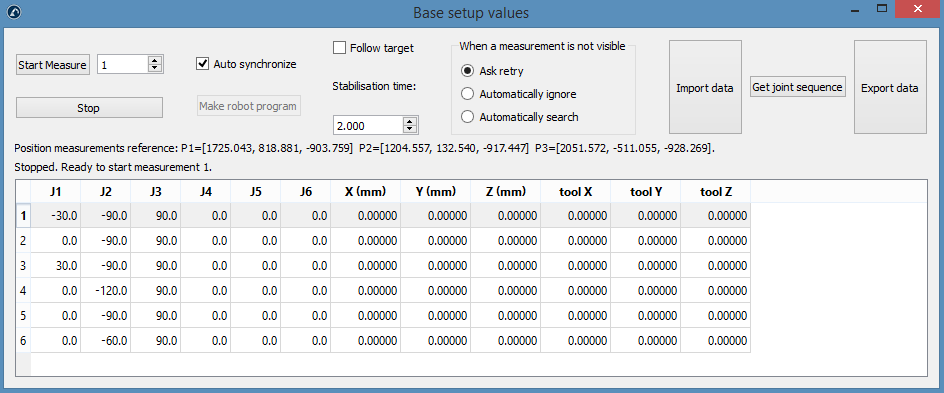
Schließen Sie das Fenster, wenn die Messungen abgeschlossen sind, und das Bezugssystem der Messungen wird in Bezug auf die Roboterbasis aktualisiert. Wenn Sie kein Bezugssystem ausgewählt haben, können Sie eines hinzufügen (wählen Sie Programm➔Bezugssystem hinzufügen) und platzieren Sie dieses unter dem Roboterbasis Bezugssystem (Drag & Drop im Objektbaum).
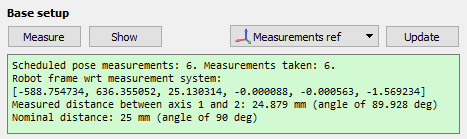
Die Zusammenfassung zeigt die Position und Orientierung oder das Bezugssystem des Roboters in Bezug auf das Bezugssystem der Kalibrierung ([x,y,z,w,p,r] Format in mm und Bogenmaß)