Messen der Referenzziele
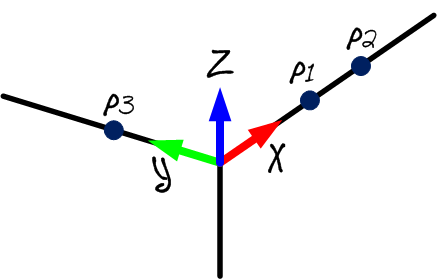
Es wird empfohlen, ein Kalibrierungsbezugssystem zu messen, das an die Roboterbasis angebracht ist. Dies ist hilfreich, wenn Sie den Tracker während der Kalibrierung verschieben oder zwei Roboterkalibrierungen vergleichen möchten. Dieser muss durch 3 erreichbare Punkte definiert werden.
Sie können diesen Schritt überspringen, wenn Sie den Tracker nicht in Bezug auf den Roboter bewegen oder die Ausgangsposition für Achse 1 nicht wiederherstellen müssen. In diesem Fall wird das Bezugssystem des Lasertrackers verwendet.
Sie sollten diese Schritte jedes Mal befolgen, wenn der Laser Tracker bewegt wird:
1.Wählen Sie Verbinden➔Laser Tracker verbinden.
2.Stellen Sie die IP des Laser Trackers ein und wählen Sie verbinden (wenn der Laser Tracker nicht angeschlossen ist).
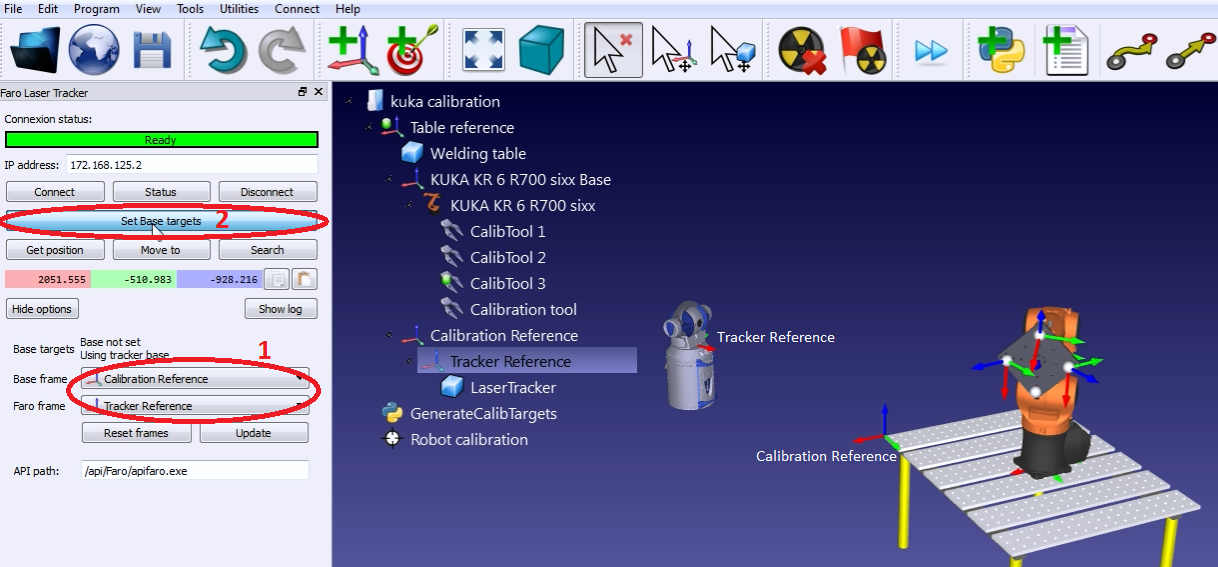
3.Stellen Sie das Kalibrierungsbezugssystem und das Tracker Bezugssystem wie im Bild gezeigt ein. Das Kalibrierungsbezugssystem wird auch als Maßbezugssystem bezeichnet.
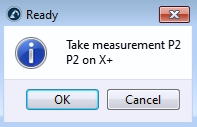
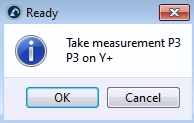
4.Wählen Sie Basisziele festlegen.
RoboDK führt den Benutzer durch die Menüs, die im nächsten Bild gezeigt werden. Die Position des Lasertrackers wird automatisch aktualisiert, sobald der Vorgang abgeschlossen ist.